build_embed_linux_system
文件系统构建综述
本节目录如下所示。
overview
Linux文件系统是用于管理和存储的一系列的文件的集合,按照功能上包含如下内容。
- 系统启动和文件管理有关的程序(init、systemd、ls、cat、cd等)。
- 存储设备信息的文件,以及系统运行相关的设备文件(/sys、/proc等)。
- 支持软件和脚本运行的环境和库(/lib/、/usr/lib)。
- 控制系统启动配置和服务器的的脚本(/etc/)。
- 其它用于进程和系统处理的目录(/tmp、/var、/opt等)。
对于文件系统,可能接触过的有busybox、buildroot、yocto、openwrt;类似桌面端的Debian、Ubuntu、Armbian、OpenEuler、麒麟等。回顾构建和使用这些系统的经历,有问题一直在困扰我?为什么使用这些工具能够构建可用的文件系统,它们实现的原理是什么,为什么按照这些的步骤就可以实现可用的文件系统。busybox、buildroot、debian、openwrt等它们是否有什么联系?在理解这个问题以前,无论是构建文件系统、交叉编译软件,都可以说迷雾重重;在系统的去理解了这个问题之前,虽然构建了各类型的文件系统,仍然时雾里看花,无法建立体系。
那么什么时文件系统,这里用一句话解释,文件系统是被内核和应用访问的,由目录和文件构成的树结构的集合体。它设计上是为内核提供可以对外的访问接口,而在Linux中”一切皆文件的思想”指导下,这些接口又以文件的形式展示。对于大部分系统来说,U-Boot在完成加载Kernel和设备树、传递启动命令行参数后,并跳转执行后,就不在发挥作用;我们日常打交道的就是内核和文件系统。其中内核向上层暴露了一系列文件和接口,其中接口以glibc库的形式进一步封装,方便上层用于管理。在应用中,通过系统调用、库函数等方式访问这些文件和接口,完成对系统的管理和控制;系统的框架如下所示。
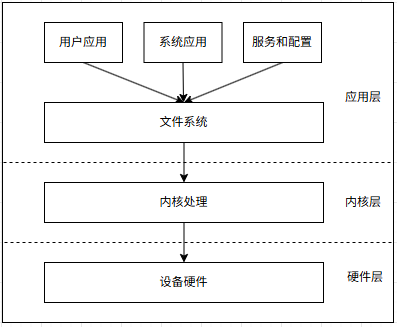
可以看到,文件系统提供系统和应用程序的运行环境;通过glibc库,以及相关文件,实现应用层对于内核的访问。基于这些信息,就可以将文件系统进一步解构,包含如下结构。
- 创建包含系统工作需要的目录(bin, dev, etc…)
- 必须的配置文件和服务,以及权限管理机制(/etc/profile, /etc/init.d/…)
- 运行的必要环境变量和执行程序(bash, tar…)
- 支持上述程序或脚本运行的库(libc.so, libdrm.so…)
- 用户安装的扩展系统功能的程序(/usr/bin/,/sbin/)。
理解了上述这些,就可以进一步去掌握文件系统各目录的功能,具体如下。
- bin 必须,存放系统执行的必备二进制工具,用于系统启动和快速访问,如bash,cp,mkdir等。
- boot 可选,启动目录,存放启动文件;可在系统启动时加载执行,可以不存在。
- dev 必须,包含了与硬件设备相关的特殊文件。dev目录下的文件在系统启动时由内核自动创建,这些文件是系统提供的访问内核硬件的接口文件,用于与硬件设备、驱动程序以及其他内核的数据交互。
- etc 必须,系统配置文件目录,用于管理系统启动配置项和服务项,如启动脚本,系统服务,网络配置。
- etc/fstab 定义文件系统的静态信息的文件。它包含了系统中硬盘分区、挂载点、文件系统类型、挂载选项等信息,用于指导系统如何挂载文件系统。
- etc/hosts 包含了本机或其他主机的IP地址和对应的主机名,以及主机名的别名。
- etc/passwd 包含用户信息的文件,如用户名,权限以及启动后执行的脚本命令。
- etc/shadow etc/passwd的影子口令文件,用户密码信息存放在此处,root权限可读。
- etc/init.d/rc* 启动、或改变运行集执行的脚本文件。
- home 根目录,通过adduser创建的自定义用户目录位于此目录下;一般仅特定用户支持的文件和工具也安装在此。
- lib 必须,用于存放系统所需的共享库文件的目录。这些库文件包含了程序运行时所需要的函数和数据,以便程序能够正确地执行。
- lib32/lib64 可选,用于存放32位和64位系统所需的共享库文件的目录(有些系统可以全部都在lib目录下)。
- lost+found 可选,用于存储文件系统中的碎片文件和丢失文件的目录。当文件系统发生错误时,可能会产生一些碎片文件或丢失文件,这些文件通常位于lost+found目录下
- media 可选,用于挂载可移动存储设备的目录,提供方便,统一的挂载点
- mnt 可选,mnt目录是一个挂载点,用于临时挂载文件系统。它通常用于挂载外部存储设备或网络文件系统,以便用户可以轻松地访问和操作这些文件系统。
- opt 可选,用于存放独立的第三方软件包,这些软件包通常不是操作系统的核心组件,提供可选的安装目录。
- proc 必须,和/dev/类似,不过与设备不同,这里提供应用层操作内核配置和参数的接口(包括硬件),使得用户和应用程序可以通过/proc来查看有关系统硬件、当前正在运行进程的信息,甚至可以更改其中某些文件来改变内核的运行状态。
- root 必须,root用户的工作目录,存储root用户的个人文件和配置信息。
- run 可选,是一个临时文件目录,用于存储系统启动以来的信息,重启后,系统会自动删除相关信息。
- sbin 必须,主要放置了一些系统管理的必备程序。
- srv 服务目录,存放本地服务的相关文件。
- sys 必须,虚拟文件系统目录,也称为sysfs,它提供了对内核对象和设备树的访问。
- tmp 必须,临时文件存储目录,其作用是为应用程序和用户提供公共的临时文件存储空间,重启后会清除tmp缓存信息。
- usr 必须,用户安装的软件和文件,以及系统默认的软件和文件,包含了系统的核心文件和应用程序。
- var 可选,包含了在系统运行过程中会改变的文件,这些文件通常包括日志文件、临时文件和缓存文件。
上面是文件系统的目录结构和功能说明,对于用户来说,主要接触的目录为/bin、/usr、/sbin、/lib、/etc目录等配置和管理整个系统,对于嵌入式开发者,还需要关注/dev、/proc、/sys目录用于查看内核系统的状态。
关于rootfs目录的标准定义参考网址: http://www.pathname.com/fhs
文件系统的构建过程,就是创建上述目录,并在对应目录下添加相应文件、库或者程序的过程。也就是说,手动创建这些目录,然后添加文件、库或者程序,也可以构建可用的文件系统。而上面提到文件系统的构建过程,本质上也是实现这些目录和文件的过程;当然方法可能千差万别,既有手动编译构建,也有下载安装。理解了文件系统的本质,那么构建系统和交叉编译的问题就有另外的思路去理解。
构建系统的步骤可以分为如下:
- 创建系统启动的目录(主要是上面的必须目录)。
- 完善系统启动必须的动态库;放置在/lib和/usr/lib目录。
- 安装系统启动的必要命令工具,如init,bash(sh), cp, ls等,放置在/bin, /sbin目录
- 创建系统执行的必要配置和服务,主要是启动进程、磁盘管理、用户管理和配置服务等,主要在/etc目录实现。
至此,一个基于命令行的,可命令行访问的最小文件系统构建完成。BusyBox的构建就是基于此逻辑。不过这样构建的系统只支持最基本的功能,如/etc启动配置,基本shell命令(ls, cd,mv)等。需要支持更多的功能,就需要去找源码单独编译移植,然后将动态库和程序安装到相应的目录中,这就涉及交叉编译的内容。当然部分复杂的系统会构建服务器端存储已经编译好的程序和库,直接下载即可,apt、yum的原理即是于此。
可以看到在这里,第一大章讲述的知识终于串联在一起。基于busybox的系统构建仅提供必要的命令工具和文件;系统中需要的目录,动态库和配置文件都需要手动创建或添加。这种方式其实十分麻烦,而且不同版本或库的兼容性问题处理也十分繁杂,只能用于了解系统构建过程,在实践中很少使用。
为了解决这类问题,就有技术人员发起项目;通过脚本工具链,以BusyBox这类方案为基础、集合Linux平台常用工具、配合界面化的管理,实现通过配置命令的方式直接生成打包完整的文件系统,这就是buildroot的框架本质。当然Buildroot项目支持更加全面,不仅包含以busybox,systemd的基础系统,还支持扩展添加python,lua等软件;通过类似内核Kconfig的图形化配置,Buildroot兼顾了自动化构建和系统完全可裁剪系统的优点,对于低性能嵌入式soc方案,目前就是较优选择。
Buildroot是通用的方案,适配大部分的SOC,这也带来了配置的复杂度。对于某个特定的SOC,应用就需要很多适配硬件的配置项的调整,这也是文件构建的痛点和难点。部分厂商参考这个思路,以某个U-Boot和Kernel版本为基础,根据自家平台进一步整理个性化,包含私有的配置和更丰富的软件,然后打包以SDK形式发布,允许用户直接编译使用。Yocto系统就是按照这个思路设计的。比起Buildroot来说,Yocto更加个性化和专用化,用户可以在修改很少配置项的情况下实现丰富的功能,也是常见的选择。
当然,有些芯片厂商或者方案商也会根据行业的特殊需求定制对应的系统。例如openwrt就服务于软路由实现,自带网络层转发管理和远程Web控制,其内部也集成下载工具,支持通过opkg安装离线和本地软件,是为路由应用专门定制的os系统。
BusyBox、Buildroot、Yocto和Openwrt这些文件系统的构建都涉及到环境构建和编译,不仅构建需要耗费大量的时间,而且文件系统的编译也十分依赖系统环境的支持。在编译过程中,不同版本的系统环境以及库支持往往千差万别,如何解决编译的兼容问题也是构建平台的大麻烦。那么有没有将需要的二进制执行文件,脚本,配置文件压缩后放置在指定地址;用户只需要下载解压,执行安装既可以生成,不需要编译就可以完善系统呢?类似桌面端的Ubuntu使用iso安装,再通过apt更新程序版本;这当然存在,嵌入式Linux端也有同样的解决方案。Debian文件系统就是基于此方法构建的,后面提到的debootstrap可以理解为专用的系统下载和构建工具。而Ubuntu则属于对Debian的进一步整合,包含更多的库和程序。当然也还有其它一些文件系统在Debian或Ubuntu上进一步整合,如Armbian、麒麟、OpenEuler等。虽然构建方式不同,也更加复杂,但仍然属于这类文件系统。
至此,主流文件系统的构建方式讲解完毕;理解了这些,就可以更清晰的构建文件系统。下面则从启动流程梳理文件系统的组成,应该有着不一样的感觉。
startup
内核在启动的最后阶段,会查找并执行起始进程,也就是init指定的程序;然后会挂载文件系统,通过脚本执行必要的初始化,进入shell命令行。这时就进入熟悉的命令行界面,可以通过串口进行打印访问。
对于嵌入式Linux平台,主流文件系统启动方式为System V和Systemd。
- System V管理的系统,启动执行init进程。然后再这里以基于BusyBox,添加启动脚本最终构建文件系统为例,如BusyBox、Yocto、OpenWrt、Buildroot(两种都支持)等。
- Systemd管理的系统,这一类主要是Debian,Ubuntu,Armbian这类文件系统,包含一系列二进制程序和服务单元。通过单元为基本管理对象,每个单元代表系统中的一个资源或服务进行管理。
sysvinit
Sysvinit,即System V风格的init系统,是早期Linux发行版中使用的默认init系统。init进程是Linux系统中的第一个用户级进程,其进程号始终为1,负责启动其他用户级进程、服务和系统。这里以编译的Buildroot文件系统启动流程来说明执行流程。
/etc/inittab
/etc/inittab是Linux系统中一个非常重要的配置文件,它用于定义init进程的行为,格式:
| identifier(标识符) | run_level(运行级别) | action(动作关键字) | process(要执行的shell命令)|
identifier(标识符) :用于唯一标识/etc/inittab文件中的每一个登记项。它通常是一个简短的字符串,最多为4个字符
run_level(运行级别) :指定相应的登记项适用于哪一个运行级。运行级别是系统的一种状态,表示系统当前运行的模式。在该字段中,可以同时指定一个或多个运行级,其中各运行级分别以数字0、1、2、3、4、5、6或字母a、b、c表示,且无需对其进行分隔。如果为空,则相应的登记项将适用于所有的运行级
0: 关机状态
1: 单用户模式,只有系统管理员能够登录
2: 多用户模式,但不支持网络
3: 完全的多用户模式,支持网络,是大多数服务器的默认模式
4: 用户自定义的运行级别,通常不使用
5: 图形用户界面模式,启动X-Window系统
6: 重启系统
action(动作关键字): 用于指定init命令或进程对相应进程(在“process”字段定义)所实施的动作。具体的动作包括:
sysinit :系统初始化,只在系统启动或重新启动时执行一次
respawn :如果相应的进程不存在,则启动该进程;如果进程终止,则重新启动该进程
askfirst :与respawn类似,但在运行进程前会打印提示信息,等待用户敲入回车后再执行
wait :启动进程并等待其结束,然后再处理/etc/inittab文件中的下一个登记项
once :启动相应的进程,但不等待该进程结束便继续处理/etc/inittab文件中的下一个登记项;当该进程死亡时,init也不重新启动该进程
ondemand :与respawn的功能相同,但只用于运行级为a、b或c的登记项
ctrlaltdel :当用户按下Ctrl+Alt+Del组合键时执行对应的进程
shutdown :用于关闭系统执行的动作
powerfail、powerwait、powerokwait、powerfailnow :与电源故障相关的动作
boot和bootwait :在引导过程中执行的进程
off :如果相应的进程正在运行,则发出警告信号,等待20秒后强行终止该进程
initdefault :设置系统的默认运行级别
process(要执行的shell命令) :指定要执行的进程和它的命令行。任何合法的shell语法都适用于该字段
这里以Buildroot生成的inittab说明。
# Buildroot中的/etc/inittab文件
::sysinit:/bin/mount -t proc proc /proc # 创建了一个到内核数据结构的接口
::sysinit:/bin/mount -o remount,rw / # 重新挂载一个已经挂载的文件系统,改变其挂载选项为可读写
::sysinit:/bin/mkdir -p /dev/pts /dev/shm
::sysinit:/bin/mount -a # 用于根据/etc/fstab文件挂载所有未挂载的文件系统
::sysinit:/bin/mkdir -p /run/lock/subsys
::sysinit:/sbin/swapon -a # 用于根据/etc/fstab文件启用所有标记为交换空间的设备或文件
null::sysinit:/bin/ln -sf /proc/self/fd /dev/fd
null::sysinit:/bin/ln -sf /proc/self/fd/0 /dev/stdin
null::sysinit:/bin/ln -sf /proc/self/fd/1 /dev/stdout
null::sysinit:/bin/ln -sf /proc/self/fd/2 /dev/stderr
::sysinit:/bin/hostname -F /etc/hostname # 指定/etc/hostname作为系统hostname来源
# now run any rc scripts
::sysinit:/etc/init.d/rcS # 执行rcS脚本
# Put a getty on the serial port
console::respawn:/sbin/getty -L console 0 vt100 # 指向界面显示/dev/console
ttymxc0::respawn:/sbin/getty -L ttymxc0 0 vt100 # 指向串口显示/dev/ttymxc0
# Stuff to do for the 3-finger salute
#::ctrlaltdel:/sbin/reboot
# Stuff to do before rebooting
::shutdown:/etc/init.d/rcK
::shutdown:/sbin/swapoff -a # 移除swap空间
::shutdown:/bin/umount -a -r # 移除/etc/fstab挂载的文件系统
如果需求实现root用户直接登录。
# 串口请求修改如下
# Put a getty on the serial port
ttymxc0::respawn:-/bin/sh
/etc/fstab
/etc/fstab文件是Linux系统中用于定义和管理文件系统的挂载信息的配置文件。详细解释如下。
- 设备文件(Device):需要挂载的设备或分区。
- 设备名:直接使用物理设备名或分区名,/dev/root表示根分区
- UUID:每个分区都有一个唯一标识符(UUID),使用UUID=xxxx-xxxx-xxxx格式可以更加稳定地标识设备,因为设备名在不同的启动过程中可能会改变
- Label:如果为分区设置了标签(Label),可以通过LABEL=MyData的方式引用设备。
-
挂载点(Mount Point):文件系统挂载的位置,即它在目录树中的路径。挂载点可以是任何一个空目录
-
文件系统类型(File System Type):指定文件系统类型,它告诉内核如何处理该分区。
- ext4:目前大多数Linux系统的默认文件系统,支持日志记录和大文件;
- vfat:FAT32文件系统,用于U盘和移动设备兼容Windows系统的情况;
- nfs: 网络文件系统,允许从远程服务器挂载文件系统
- sysfs: 虚拟文件系统,提供了内核对象的接口,用于查看和修改内核参数
- proc: 虚拟文件系统,提供了内核运行时信息的接口,如进程、内存、文件系统等
- 挂载选项(Mount Options):控制文件系统的行为。这些选项以逗号分隔,组合使用时不要有空格。
- defaults:这是一组默认的选项,包括rw(读写)、suid(允许setuid位)、dev(解释字符和块设备)、exec(允许可执行文件)、auto(自动挂载)、nouser(用户无法挂载)、async(异步I/O操作)
- ro/rw:以只读(ro)或读写(rw)模式挂载。
- noatime:不更新文件访问时间,提升性能,特别适合SSD和高性能服务器。
- nodiratime:不更新目录访问时间,进一步优化性能
- noauto:文件系统不会在系统启动时自动挂载,用户需要手动执行mount命令来挂载它。这个选项适用于不常用的设备或网络文件系统,防止因设备不可用导致的错误。
- noexec:禁止在文件系统上执行可执行文件。
- nofail:即使设备在启动时不可用,系统仍会继续正常启动,不会中断或进入应急模式。
-
Backup Operation(dump 参数):指定是否启用dump备份程序。通常这个参数的值为0或者1,0表示不备份,1表示备份
-
Pass Order(fsck 参数):决定系统在启动时使用fsck工具检查文件系统的顺序。这个数字值是用来指定系统启动时是否检查文件系统的完整性以及检查的顺序。通常这个参数的值为0、1或2:
- 0:不检查该文件系统。通常对swap分区或远程挂载(如NFS)使用。
- 1:通常用于根分区(/),表示启动时首先检查这个分区。
- 2:一般用于对其他分区进行检查(如/home、/var等),检查顺序可以根据需要设置。如果数字相同,则会按照/etc/fstab文件中的出现顺序来进行检查。
# <file system> <mount pt> <type> <options> <dump> <pass>
/dev/root / ext2 rw,noauto 0 1
proc /proc proc defaults 0 0
devpts /dev/pts devpts defaults,gid=5,mode=620,ptmxmode=0666 0 0
tmpfs /dev/shm tmpfs mode=0777 0 0
tmpfs /tmp tmpfs mode=1777 0 0
tmpfs /run tmpfs mode=0755,nosuid,nodev 0 0
sysfs /sys sysfs defaults 0 0
/etc/init.d/rcS
#!/bin/sh
# 执行/etc/init.d目录下以S*开头的脚本进行执行,以.sh结尾的直接执行,其它带start参数执行
# Start all init scripts in /etc/init.d
# executing them in numerical order.
#
for i in /etc/init.d/S??* ;do
# Ignore dangling symlinks (if any).
[ ! -f "$i" ] && continue
case "$i" in
*.sh)
# Source shell script for speed.
(
trap - INT QUIT TSTP
set start
. $i
)
;;
*)
# No sh extension, so fork subprocess.
$i start
;;
esac
done
对于rcS中执行的脚本,主要包含seedrng, syslogd, klogd, sysctrl, network等执行流程。
- seedrng: 用于为随机数生成器(RNG)提供种子的工具或命令
- syslogd是一个守护进程,用于记录系统运作中由kernel或应用程序产生的各种信息
- klogd从内核读取日志信息,解码并转发给其他服务,如syslogd,有助于系统维护和故障排查
- sysctl命令提供了一些选项,用于查询和修改内核参数
- network: 启动网络服务,执行”/sbin/ifup”,解析/etc/net/interface,进行网络处理
/etc/net/interface
/etc/network/interfaces文件是Linux系统中用于配置网络接口的一个关键配置文件,特别是在基于Debian的Linux发行版(如Ubuntu)中。该文件包含了网络接口的设置信息,如IP地址、子网掩码、网关、DNS服务器等。系统管理员通过编辑此文件来配置或修改网络接口的设置。
- 配置静态IP地址
auto eth0
iface eth0 inet static
address 192.168.1.100
netmask 255.255.255.0
gateway 192.168.1.1
dns-nameservers 8.8.8.8 8.8.4.4
- 配置动态IP地址
auto eth0
iface eth0 inet dhcp
- 配置使能回环地址
auto lo
iface lo inet loopback
/etc/passwd
账户信息保存在/etc/passwd中, 包含了所有系统用户账户以及每个用户的基本配置信息,口令信息一般保存在/etc/shadow中。
- /etc/passwd存储用户信息
# /etc/passwd说明
freedom:x:1000:1000:,,,:/home/freedom:/bin/bash
登录用户名:用户口令:用户UID:组UID:备注:$HOME:用户启动得shell
- /etc/shadow存储密码信息
# /etc/shadow说明
freedom:$$$$$$$$$$$$$$$$$$:19831:0:99999:7:::
登录用户名:用户口令:密码最后修改时间:最小密码效期:最大密码效期:密码警告周期:密码不活跃周期:账户到期日期:保留字段
- /etc/group存储组管理信息
# /etc/group说明
netdev:x:116:freedom
组名:加密密码:组ID:用户列表
systemd
systemd是Linux系统中的一个系统和服务管理器,它负责在系统启动时启动系统服务、管理系统进程和资源,以及在系统运行时提供各种系统管理功能。systemd的设计目标是提供一个高效、可靠、灵活的系统管理框架,以取代传统的SysV init系统。
systemd的主要特点和功能包含:
- 并行启动:systemd可以并行启动多个系统服务,提高系统启动速度。
- 依赖管理:systemd支持服务之间的依赖关系,可以确保服务按照正确的顺序启动。
- 资源管理:systemd可以管理系统资源,如内存、CPU、网络等,确保系统资源的合理分配。
- 日志管理:systemd集成了日志管理功能,可以方便地查看和管理系统日志。
- 自动重启:systemd可以自动重启失败的服务,确保系统的稳定性。
- 动态配置:systemd支持动态配置,可以在系统运行时修改服务的配置。
- 用户管理:systemd支持用户管理,可以管理用户的登录和会话
systemd系统启动流程通常包括以下几个阶段.
- systemd进程启动:内核启动后,执行init程序,即systemd进程。systemd进程成为PID为1的进程,即系统的初始进程。
- 读取配置文件:systemd读取配置文件和设置,包括全局系统配置(/etc/systemd/system.conf)、用户级别的配置(/etc/systemd/user.conf)、网络配置(/etc/systemd/network/*.network)、时间同步配置(/etc/systemd/timesyncd.conf)、DNS解析配置(/etc/systemd/resolved.conf)、日志配置(/etc/systemd/journald.conf)、登录配置(/etc/systemd/logind.conf)、用户级别的服务配置(/etc/systemd/user@.service)、默认目标配置(/etc/systemd/system/default.target)等。此外,systemd还会读取环境变量、命令行参数等设置。
- 启动各个单元(Units):unit是systemd中的一个基本概念,表示一个系统功能或服务。systemd会根据配置文件和设置,启动各种units,包括服务(service)、设备(device)、挂载点(mount)等。每个unit都有一个名称和一个类型,systemd使用依赖关系来确保正确的启动顺序,即先启动依赖的服务或设备,再启动其他服务或设备。
- 启动服务:对于服务类型的units,systemd会启动相应的服务进程,并将其运行在指定的用户和组下。服务进程可以是任何可执行文件,例如HTTP服务器、数据库服务器等。systemd会监控服务的运行状态,并在需要时重新启动服务或重新加载配置文件。
- 监听和处理信号:systemd会监听各种信号,例如SIGTERM、SIGINT等,以响应用户的请求或系统事件。当收到信号时,systemd会根据信号的类型和目标units的状态,采取相应的操作,例如停止服务、重启服务等。
接下来systemd就会启动系统服务单元,执行相应的启动程序,关于systemd服务格式,如下所示。
[Unit]
Description: service的简单描述
Requires(可选): 设置服务的强依赖性,表示当前服务启动之前必须启动的其他服务
After(可选):指定服务启动的顺序,表示当前服务应该在哪些服务之后启动
Before(可选):与After相反,指定服务启动的顺序,表示当前服务应该在哪些服务之前启动
Wants(可选):设置服务的弱依赖性,表示当前服务启动之后可能还需要启动的其他服务
Conflicts(可选):定义服务间的冲突关系,表示如果当前服务启动,则指定的服务不能启动
[Service]
Type:服务进程启动类型,如simple、forking、oneshot、dbus、notify和idle等
ExecStart:指定启动服务时要运行的命令或脚本的绝对路径。
ExecStartPre(可选):在ExecStart之前运行的命令或脚本
ExecStartPost(可选):在ExecStart之后运行的命令或脚本
ExecStop:指定停止服务时要运行的命令或脚本
ExecReload(可选):指定重新加载服务配置时要运行的命令或脚本
Restart:指定服务在失败或停止时是否自动重启,以及重启的策略(如always、on-failure等)
RestartSec(可选):在服务重启之前等待的时间间隔
EnvironmentFile(可选):指定环境配置文件的路径。
[Install]
WantedBy:指定服务应该与哪个目标(target)一起启动,通常设置为multi-user.target,表示服务将在多用户模式下启动
Also(可选):指定在安装本服务时还要安装的其他相关服务
Alias(可选):为服务指定别名,方便使用systemctl命令进行管理
这边举例实现一个简单的服务,实现开机自启。
首先,创建一个名为my-service.service的systemd服务文件,内容如下:
[Unit]
Description=My Custom Service
After=network.target
[Service]
Type=simple
ExecStart=/usr/local/bin/my-service.sh
Restart=on-failure
[Install]
WantedBy=multi-user.target
然后,将该文件保存到/etc/systemd/system/目录下。
接下来,启动并启用该服务:
sudo systemctl start my-service
sudo systemctl enable my-service
这样,my-service就会在系统启动时自动启动,并且在服务失败时会自动重启。
catalogue
下面以主流的文件系统构建方法,展示如何实现用于产品运行的系统平台,具体如下所示。
- 基于busybox构建文件系统
- 基于buildroot构建文件系统
- 基于debian构建文件系统
- 基于Ubuntu Core构建文件系统
- 支持QT的Linux文件系统构建
- 基于openwrt构建文件系统
- 基于armbian构建系统平台
- 构建Android系统平台