build_embed_linux_system
spi设备和驱动管理框架
SPI是一种高速,高效率的串行接口技术,通常由一个主模块和一个或多个从模块构成。主要用于芯片和芯片,芯片和器件之间的数据传输通讯。SPI设计上为主从结构,在工作时通过主机提供时钟信号,发送数据的同时从接收引脚上读取数据,同时实现数据接收和发送功能,因此为全双工模式。SPI设计上没有类似I2C的地址来区分从机设备,对于多从机的通讯,主要依赖CS引脚来选中芯片工作。当SPI总线上有多个芯片使能,写入不影响,但多从机读取时会发生总线竞争,有可能导致接收数据异常。当管理多个器件时,设计上需要每个芯片拥有独立的片选控制CS引脚。
- 片选CS,芯片使能控制脚,低电平有效居多,当CS为高时芯片不工作,可通过多个CS脚,控制芯片的开关从而实现SPI访问多个外部芯片。
- 时钟CLK,时钟引脚,由主机发出,为主从机通讯提供同步时钟。
- 主机输出接口(MOSI),主机数据输出脚,配合Clock同步发出数据,从机接收。
- 主机输入接口(MISO),主机数据输入脚,根据Clock接收数据,从机发送。
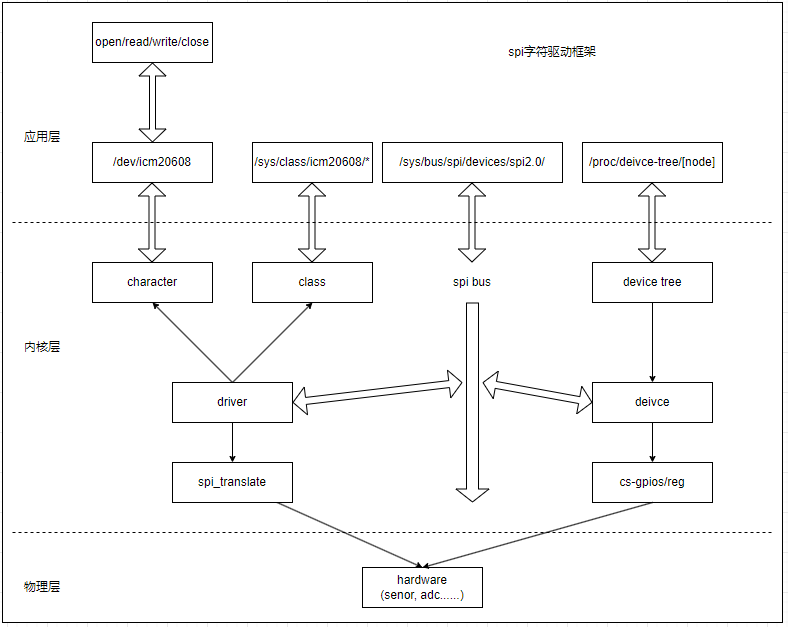
按照设备驱动模型,由总线,设备,驱动三部分构成;分别对应SPI总线,SPI器件设备树实现,SPI器件驱动。
本节也按照这个顺序说明,目录如下所示。
hw_driver_module
SPI的通讯作为全双工的通讯协议,支持的时序如下所示。
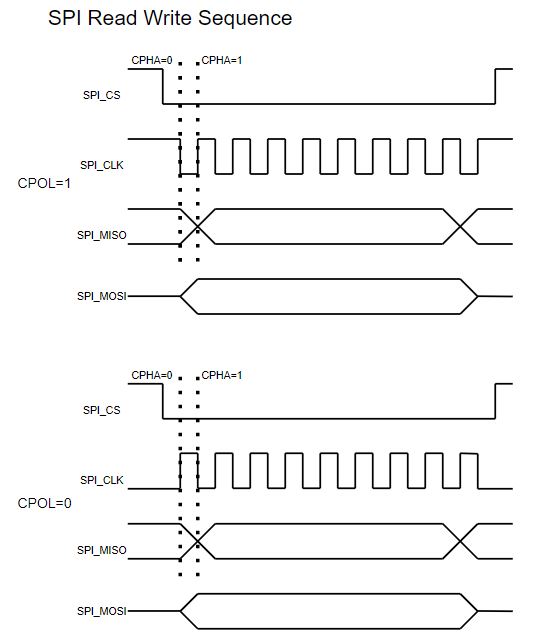
可以看到,对于SPI中最重要的两个参数是CPOL和CPHA,这两个参数的含义如下所示。
- CPOL表示空闲状态下时钟CLOCK的电平,0表示低电平,1表示高电平。
- CPHA则表示接收端数据采样的边沿,0表示第一个边沿,1表示第二个边沿。
当CPOL和CPHA确认后,即可确定下单次SPI通讯的时序。理解了这些,SPI的驱动就比较简单,包含初始化和读写接口。 其中初始化部分主要包含如下信息。
- 工作模式,主机或者从机,支持一主多从的工作方式
- 工作使用线缆数量,支持单线模式或者双线模式,双线模式就是上面独立的发送和接口引脚,全双工通讯,单线模式又包含两种。只发送/只接收的单向模式或者单线双向模式,此时为半双工的收发通讯
- 数据位宽,支持8bit和16bit,对于SPI来说,8bit和16bit都是常用的,但是16bit可以提高效率,同时支持双线模式。对于SPI的数据发送,通常高位先发送,低位后发送,不过也支持通过硬件配置,实现低位在前发送,需要和外部器件保持一致
- CPOL和CPHA配置,需要与器件的要求一致。
- NSS功能用于控制CS片选引脚输出和输入功能,设置为Soft可以作为普通引脚控制,也可以通过SSI位控制;硬件模式则作为主SPI时,在发送广播数据时会强制拉低NSS引脚(标准SPI为低电平有效,少部分器件高电平有效,需要软件控制)。
- 另外是与数据通讯相关的参数配置,包含波特率,首位先发送,数据带CRC校验等;这些都是与具体器件有关,需要根据实际情况进行配置。
一个典型的spi硬件拓扑如下所示。
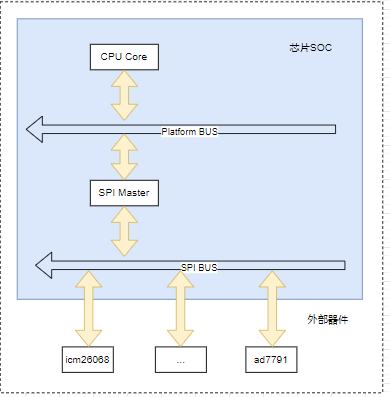
可以看到spi硬件框架和i2c基本一致,spi模块由platform总线管理,构成SPI总线,然后通过SPI总线管理外部设备,其框架如下所示。
对于内部SPI设备,初始化内容如下所示。
- 配置模块对应的I/O引脚
- SPI工作时钟配置
- SPI工作模式配置
- SPI工作中断配置
对于外部器件实现功能则是。
- 初始化器件,配置寄存器(如果需要)
- 实现读,写外部器件的接口。
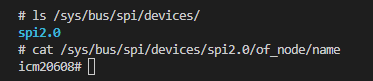
基于此,整个驱动其实由两块独立的实现,SPI总线驱动和SPI器件驱动,其中SPI属于内部模块,基于platform总线匹配加载,SPI器件属于挂载在spi总线的设备,基于spi总线匹配加载驱动。spi总线注册成功后,可在对应总线下查看设备。
# 查看spi总线下设备
ls /sys/bus/spi/devices
# 查看具体设备名称
cat /sys/bus/spi/devices/spi2.0/of_node/name
显示如下所示。
dts_bus_driver
对于SPI模块,是挂载在/soc/aips1@2000000/spda-bus@2000000/下的节点ecspi3@2010000,其设备树如下所示。
soc: soc {
//......
aips1: bus@2000000 {
//.....
spba-bus@2000000 {
//spi接口设备树
ecspi3: spi@2010000 {
#address-cells = <1>; // 定义"子节点"寄存器个数,占用1个
#size-cells = <0>; // 定义"子节点"寄存器长度占用,表示不存在
compatible = "fsl,imx6ul-ecspi", "fsl,imx51-ecspi"; // compatible: 标签,用于platform驱动匹配
reg = <0x02010000 0x4000>; // SPI配置寄存器列表
//...
};
};
};
};
&ecspi3 {
fsl,spi-num-chipselects = <1>; // 自定义类型,用于定义spi已选择的器件数量
pinctrl-0 = <&pinctrl_ecspi3>; // 定义对应引脚的pinctrl配置
pinctrl-names = "default"; // 定义引脚配置的别名,驱动访问时需要
cs-gpios = <&gpio1 20 GPIO_ACTIVE_LOW>,
<&gpio1 19 GPIO_ACTIVE_LOW>; // cs-gpios片选引脚,第一个对应后面reg=<0>,依次递增
status = "okay"; // 模块状态,关闭
spidev0: icm20608@0 {
compatible = "rmk,icm20608"; // compatible: 标签,用于spi总线匹配
spi-max-frequency = <8000000>; // 定义spi的最大工作时钟
reg = <0>; // spi设备地址,和cs-gpios第一个I/O匹配
};
spidev1: ad7791@1 {
compatible = "rmk,ad7791"; // compatible: 标签,用于spi总线匹配
reg = <1>; // spi设备地址,和cs-gpios第二个I/O匹配
};
};
对于设备树的解析和总线的创建参考代码路径如下。
- spi设备树解析: driver/spi/spi.c
- spi总线驱动: drivers/spi/spi-imx.c。
大致解析SPI总线驱动文件,主要由以下几部分构成。
//1. 设备树解析和配置参数获取
if (!device_property_read_u32(&pdev->dev, "num-cs", &val))
controller->num_chipselect = val;
else
controller->num_chipselect = 3;
//中断请求配置
ret = devm_request_irq(&pdev->dev, irq, spi_imx_isr, 0,
dev_name(&pdev->dev), spi_imx);
//获取和使能时钟
spi_imx->clk_ipg = devm_clk_get(&pdev->dev, "ipg");
spi_imx->clk_per = devm_clk_get(&pdev->dev, "per");
ret = clk_prepare_enable(spi_imx->clk_per);
ret = clk_prepare_enable(spi_imx->clk_ipg);
//2. 注册bus总线控制器
spi_imx->controller->transfer_one = spi_imx_transfer_one;
spi_imx->controller->setup = spi_imx_setup;
spi_imx->controller->cleanup = spi_imx_cleanup;
spi_imx->controller->prepare_message = spi_imx_prepare_message;
spi_imx->controller->unprepare_message = spi_imx_unprepare_message;
spi_imx->controller->slave_abort = spi_imx_slave_abort;
spi_imx->controller->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH | SPI_NO_CS;
controller->dev.of_node = pdev->dev.of_node;
ret = spi_register_controller(controller);
通过spi的总线驱动,就在系统中创建了对应的spi总线控制器,这样我们就可以进一步基于spi bus实现外部器件驱动,这就是我们进一步配置的过程。
spi总线代码一般由芯片厂商开发,用于适配芯片对应的SPI模块,因此对于NXP,TI,瑞芯微或全志,都有一定差异,不一定通用,因此记住概念,有大致了解即可,关键部分还是SPI外部器件驱动的实现。
另外,在spi_register_controller中会解析设备树,遍历设备树中spi下的devices字节点,最终会调用spi_add_device添加设备,生成spi_device节点。
注意: spi设备树中的cs-gpios对应硬件控制的cs片选引脚,后续spi设备编号与在cs-gpios中指定的引脚顺序有对应关系。
spi_chip_driver
spi外部器件驱动主要实现基于spi总线提供的内核接口,管理应用层和外部器件的接口。
interface
关于SPI总线涉及的内核接口,如下所示。
// SPI总线上匹配设备,加载驱动的接口
// @owner: 驱动模块
// @sdrv: 要注册的spi驱动
// @return: 0 成功,其他值失败
#define spi_register_driver(driver) \
__spi_register_driver(THIS_MODULE, driver)
int __spi_register_driver(struct module *owner, struct spi_driver *sdrv);
// 从spi设备上移除已经注册的驱动
// @driver: 要移除的spi驱动
void spi_unregister_driver(struct spi_driver *driver);
// 在spi设备上保存设备私有数据指针,用于后续访问
// @spi: 要设置私有数据的spi驱动
// @data: 要保存的私有数据指针
void spi_set_drvdata(struct spi_device *spi, void *data);
// 获取从spi接口读取的数据
// @spi: 要获取私有数据的spi驱动
// @return: 私有数据指针
void *spi_get_drvdata(struct spi_device *spi);
// 配置spi设备工作模式
// @spi: 要配置的spi驱动,主要设备工作状态
// @return: 0表示成功,其他值表示失败
int spi_setup(struct spi_device *spi)
// 初始化spi消息,用于后续添加spi数据包
// @m: 要初始化的spi消息
static inline void spi_message_init(struct spi_message *m)
// 在spi消息m中添加传输数据包t
// @t: 要添加的spi传输数据包
// @m: 要添加的spi消息
static inline void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)
// 同步spi数据传输,进行数据收发
// @spi: 要配置的spi驱动
// @message: 要传输的spi消息
// @return: 0表示控制器传输成功,其他值表示失败
int spi_sync(struct spi_device *spi, struct spi_message *message)
// 同步直接spi数据传输接口,内部实现消息init
// @spi: 要配置的spi驱动
// @xfers: 要传输的spi传输数据包数组
// @num_xfers: 要传输的spi传输数据包数量
int spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers, unsigned int num_xfers)
// 封装的spi读写接口,先写后读
// @spi: 要配置的spi驱动
// @txbuf: 要发送的数据缓冲区
// @n_tx: 要发送的数据字节数
// @rxbuf: 要接收的数据缓冲区
// @n_rx: 要接收的数据字节数
// @return: 0表示成功,其他值表示失败
int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx)
注意: 对于上述发送接收接口,返回成功只表示控制器成功,不表示外部器件正确响应;判断外部器件正确响应需要结合返回数据判断。
其中关键的结构如下所示。
// spi设备管理
struct spi_device {
struct device dev; //驱动模型中对应的设备
struct spi_controller *controller; //当前spi器件对应的总线设备控制器
struct spi_controller *master; //总线设备控制器备份,用于兼容
u32 max_speed_hz; //器件支持最大时钟频率,设备树中定义,每次传输都可以修改
u8 chip_select; //芯片选择,区分芯片处理,对应设备树中的reg值
u8 bits_per_word; //芯片支持的传输1个字的bit数,可以是1~32bits
bool rt; //是否设置总线传输为实时优先级
#define SPI_NO_TX BIT(31) /* No transmit wire */
#define SPI_NO_RX BIT(30) /* No receive wire */
#define SPI_MODE_KERNEL_MASK (~(BIT(30) - 1))
u32 mode; //spi工作模式,包含SPI_MODE_0/SPI_MODE_1等
int irq; //传递给request_irq以接收来自该器件的中断。
void *controller_state; //控制器的运行状态
void *controller_data; //特定于主板的控制器定义,如FIFO初始化参数
char modalias[SPI_NAME_SIZE];//与此设备一起使用的驱动程序的名称
const char *driver_override; //如果将驱动程序的名称写入此属性,则设备将绑定到命名的驱动程序,并且仅绑定到命名的驱动程序。
struct gpio_desc *cs_gpiod; //spi设备对应的cs片选引脚结构
struct spi_delay word_delay; //连续传输之间的延时
/* CS delays */
struct spi_delay cs_setup; //在CS被断言后由控制器引入的延迟
struct spi_delay cs_hold; //控制器在CS解除断言之前引入的延迟
struct spi_delay cs_inactive; //控制器在CS解除断言之后引入的延迟
/* The statistics */
struct spi_statistics __percpu *pcpu_statistics; //spi_device的统计信息
};
//spi mode
#define SPI_CPHA _BITUL(0) /* clock phase */
#define SPI_CPOL _BITUL(1) /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_MODE_X_MASK (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH _BITUL(2) /* chipselect active high? */
#define SPI_LSB_FIRST _BITUL(3) /* per-word bits-on-wire */
#define SPI_3WIRE _BITUL(4) /* SI/SO signals shared */
#define SPI_LOOP _BITUL(5) /* loopback mode */
#define SPI_NO_CS _BITUL(6) /* 1 dev/bus, no chipselect */
#define SPI_READY _BITUL(7) /* slave pulls low to pause */
#define SPI_TX_DUAL _BITUL(8) /* transmit with 2 wires */
#define SPI_TX_QUAD _BITUL(9) /* transmit with 4 wires */
#define SPI_RX_DUAL _BITUL(10) /* receive with 2 wires */
#define SPI_RX_QUAD _BITUL(11) /* receive with 4 wires */
#define SPI_CS_WORD _BITUL(12) /* toggle cs after each word */
#define SPI_TX_OCTAL _BITUL(13) /* transmit with 8 wires */
#define SPI_RX_OCTAL _BITUL(14) /* receive with 8 wires */
#define SPI_3WIRE_HIZ _BITUL(15) /* high impedance turnaround */
#define SPI_RX_CPHA_FLIP _BITUL(16) /* flip CPHA on Rx only xfer */
// 对于spi设备,大部分选项在驱动解析设备树时进行配置,需要用户配置的选项时每字的bit数目
//1.初始化spi接口
spi = (struct spi_device *)chip->private_data;
spi->mode = SPI_MODE_0;
spi_setup(spi);
chip_dts_parse
icm20608的硬件连接如下所示。
//1. spi器件设备树
&ecspi3 {
//....
spidev0:icm20608@0 {
compatible = "rmk,icm20608"; //compatible: 标签,用于spi总线匹配
spi-max-frequency = <8000000>; //定义spi的最大工作时钟(参考手册)
reg = <0>; //spi设备地址,和cs-gpios第一个I/O匹配
smplrt_div = /bits/ 8 <0x00>; //spi器件寄存器配置,内部解析设备树进行处理
gyro_config = /bits/ 8 <0x18>;
accel_config = /bits/ 8 <0x18>;
config = /bits/ 8 <0x04>;
accel_config2 = /bits/ 8 <0x04>;
pwr_mgmt_2 = /bits/ 8 <0x00>;
lp_mode_cfg = /bits/ 8 <0x00>;
fifo_en = /bits/ 8 <0x00>;
};
};
//2. spi设备树解析
static int icm20608_parse_dt(struct spi_icm_data *chip)
{
struct spi_device *spi;
struct device_node *np;
int ret;
spi = (struct spi_device *)chip->private_data;
np = spi->dev.of_node;
// 解析获取smplrt_div属性值
ret = of_property_read_u8(np, "smplrt_div", &chip->reg_config.smplrt_div);
if (ret) {
dev_warn(&spi->dev, "invalid smplrt_div attribute");
chip->reg_config.smplrt_div = 0x00;
}
//...
// 解析获取fifo_en属性值
ret = of_property_read_u8(np, "fifo_en", &chip->reg_config.fifo_en);
if (ret) {
dev_warn(&spi->dev, "invalid fifo_en attribute");
chip->reg_config.fifo_en = 0x00;
}
return ret;
}
spi_device
了解了内核中实现的SPI总线以及操作SPI器件的接口,就可以实践了。如何从器件手册中,提取关键信息,实现SPI器件驱动,就是本小节的重点。对于外部器件,从手册提取的信息,是实现驱动的基础,以icm20608为例,需要了解的信息如下所示。
- 器件的连接方式,主要涉及硬件的连接(3-wire/4-wire)和软件的引脚配置(设备树,模式)
- SPI的工作和读写时序,主要涉及SPI的工作模式,工作频率,以及单次读取的bits数目
- 寄存器地址和寄存器的功能,用于实现的具体芯片功能
这三部分就是需要从设备手册中整理的信息。
- 连接方式
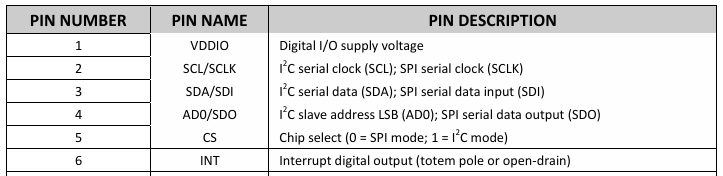
可以看到,器件的SPI方式为4-wire连接。
- 工作模式

可以得到的信息如下。
- SPI的数据MSB优先发送,
- SCK上升沿(CPOL=0),下降沿读取数据(CPHA=1),对应SPI_MODE_1。
- 最大时钟频率为8Mhz(在设备树中设定),SPI的读写操作都是先发地址,再发数据
- 其中以地址位的bit7(第一位)决定数据是读取还是写入,其中Read为1,Write为0
根据这些信息,可以配置如下信息。
//spi工作模式
//1.初始化spi接口
spi = (struct spi_device *)chip->private_data;
spi->mode = SPI_MODE_0;
spi_setup(spi);
//spi写接口
static int icm20608_write_block(struct spi_device *spi, u8 reg, u8 *buf, u8 len)
{
int ret = -1;
unsigned char *txdata;
struct spi_message m;
struct spi_transfer *t;
t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
if (!t) {
return -ENOMEM;
}
txdata = kzalloc(sizeof(char)*(len+1), GFP_KERNEL);
if (!txdata) {
ret = -ENOMEM;
goto err_mem;
}
//最高位置0, 表示写入,后续为写入数据
txdata[0] = reg & ~0x80;
memcpy(txdata+1, buf, len);
//控制spi写入
t->tx_buf = txdata;
t->len = len+1;
spi_message_init(&m);
spi_message_add_tail(t, &m);
ret = spi_sync(spi, &m);
if (ret) {
goto err_spi;
}
err_spi:
kfree(txdata);
err_mem:
kfree(t);
return ret;
}
//spi读接口
static int icm20608_read_block(struct spi_device *spi, u8 reg, void *buf, int len)
{
int ret = -1;
unsigned char *rxdata, *txdata;
struct spi_message msg;
struct spi_transfer *transfer;
transfer = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
if (!transfer) {
return -ENOMEM;
}
txdata = kzalloc(sizeof(char) * (len + 1), GFP_KERNEL);
if (!rxdata) {
ret = -ENOMEM;
goto err_mem2;
}
rxdata = kzalloc(sizeof(char) * (len + 1), GFP_KERNEL);
if (!rxdata) {
ret = -ENOMEM;
goto err_mem1;
}
//最高位置1, 表示读取
txdata[0] = reg | 0x80;
transfer->tx_buf = txdata;
transfer->rx_buf = rxdata;
transfer->len = len+1;
//控制spi读取
spi_message_init(&msg);
spi_message_add_tail(transfer, &msg);
ret = spi_sync(spi, &msg);
if (ret) {
goto err_spi;
}
memcpy(buf , rxdata+1, len);
err_spi:
kfree(rxdata);
err_mem1:
kfree(txdata);
err_mem2:
kfree(transfer);
return ret;
}
- 寄存器配置

上面就是icm20608的相关寄存器,我们根据寄存器的功能,实现配置即可。
static int spi_hardware_init(struct spi_icm_data *chip)
{
unsigned char value = 0;
struct spi_device *spi;
u8 buf;
//...
//2.复位spi外设,读取spi信息
buf = 0x80;
icm20608_write_block(spi, ICM20_PWR_MGMT_1, &buf, 1);
mdelay(50);
buf = 0x01;
icm20608_write_block(spi, ICM20_PWR_MGMT_1, &buf, 1);
mdelay(50);
icm20608_read_block(spi, ICM20_WHO_AM_I, &value, 1);
dev_info(&spi->dev, "ICM20608 ID = %#X\r\n", value);
//3.获取设备树中寄存器信息
icm20608_parse_dt(chip);
icm20608_write_block(spi, ICM20_SMPLRT_DIV, &chip->reg_config.smplrt_div, 1); /* 输出速率是内部采样率 */
//...
icm20608_write_block(spi, ICM20_FIFO_EN, &chip->reg_config.fifo_en, 1); /* 关闭FIFO*/
return 0;
}
chip_driver_code
理解了spi加载机制,对于spi器件的驱动实现就比较清晰,流程如下所示。
- 驱动加载和移除
- 器件读写接口
- 器件硬件寄存器配置
- 应用层注册关联硬件处理接口
具体实现如下所示。
- 驱动加载和移除代码
static const struct of_device_id icm20608_of_match[] = {
{ .compatible = "rmk,icm20608" }, //标签,与设备树中的compatible匹配
{ /* Sentinel */ }
};
static struct spi_driver icm20608_driver = {
.probe = icm20608_probe, //驱动加载时执行的函数
.remove = icm20608_remove, //驱动移除时执行的函数
.driver = {
.owner = THIS_MODULE,
.name = "icm20608",
.of_match_table = icm20608_of_match,
}
};
static int __init spi_icm_module_init(void)
{
return spi_register_driver(&icm20608_driver); //匹配spi总线上设备,加载驱动
}
static void __exit spi_icm_module_exit(void)
{
return spi_unregister_driver(&icm20608_driver); //移除spi设备已经匹配的驱动
}
module_init(spi_icm_module_init);
module_exit(spi_icm_module_exit);
MODULE_AUTHOR("zc"); //模块作者
MODULE_LICENSE("GPL v2"); //模块许可协议
MODULE_DESCRIPTION("icm20608 driver"); //模块许描述
MODULE_ALIAS("spi_icm20608_driver"); //模块别名
- 应用层注册关联硬件处理接口
在应用层中创建字符设备,关联读/写接口,应用层通过open/read/close进行器件访问。
static const struct file_operations spi_icm_ops = {
.owner = THIS_MODULE,
.open = icm20608_open, //
.read = icm20608_read,
.release = icm20608_release,
};
static int spi_device_create(struct spi_icm_data *chip)
{
// 参考字符设备的创建方法
}
本节中配套的spi器件驱动代码详见:spi icm20608
chip_driver_app
对于应用层读取,实现比较简单,只需要进行open/read/close接口即可,具体如下所示。
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <signal.h>
#define ICM_DEV_NAME "/dev/icm20608"
volatile sig_atomic_t running = 1;
void handle_sigbus(int signum) {
if (signum == SIGINT || signum == SIGTERM) {
running = 0;
}
}
int main(int argc, char *argv[])
{
int fd;
signed int databuf[7];
signed int gyro_x_adc, gyro_y_adc, gyro_z_adc;
signed int accel_x_adc, accel_y_adc, accel_z_adc;
signed int temp_adc;
float gyro_x_act, gyro_y_act, gyro_z_act;
float accel_x_act, accel_y_act, accel_z_act;
float temp_act;
int ret = 0;
// 设置信号处理
signal(SIGINT, handle_signal);
signal(SIGTERM, handle_signal);
// 打开设备文件
fd = open(ICM_DEV_NAME, O_RDWR);
if (fd < 0) {
printf("can't open file %s\r\n", ICM_DEV_NAME);
return -1;
}
while (running) {
// 读取spi器件数据
ret = read(fd, databuf, sizeof(databuf));
if (ret >= 0) {
gyro_x_adc = databuf[0];
gyro_y_adc = databuf[1];
gyro_z_adc = databuf[2];
accel_x_adc = databuf[3];
accel_y_adc = databuf[4];
accel_z_adc = databuf[5];
temp_adc = databuf[6];
// 计算实际角度,加速度和温度
gyro_x_act = (float)(gyro_x_adc) / 16.4;
gyro_y_act = (float)(gyro_y_adc) / 16.4;
gyro_z_act = (float)(gyro_z_adc) / 16.4;
accel_x_act = (float)(accel_x_adc) / 2048;
accel_y_act = (float)(accel_y_adc) / 2048;
accel_z_act = (float)(accel_z_adc) / 2048;
temp_act = ((float)(temp_adc) - 25 ) / 326.8 + 25;
// 打印输出值
printf("read size:%d\r\n", ret);
printf("\r\nraw value:\r\n");
printf("gx = %d, gy = %d, gz = %d\r\n", gyro_x_adc, gyro_y_adc, gyro_z_adc);
printf("ax = %d, ay = %d, az = %d\r\n", accel_x_adc, accel_y_adc, accel_z_adc);
printf("temp = %d\r\n", temp_adc);
printf("convert value:");
printf("act gx = %.2f'/S, act gy = %.2f'/S, act gz = %.2f'/S\r\n", gyro_x_act, gyro_y_act, gyro_z_act);
printf("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n", accel_x_act, accel_y_act, accel_z_act);
printf("act temp = %.2f'C\r\n", temp_act);
}
else
{
printf("read issue:%d\r\n", ret);
break;
}
sleep(1);
}
// 关闭设备文件
close(fd);
return 0;
}
详细文件可参考: spi应用读取文件
summary
至此,关于spi的总线驱动spi接口器件icm20608的驱动讲解完成。spi并不是特别复杂的接口,不过连接的器件类型总类繁多。FLash,OLED,3-axis sensor,ADC芯片,库仑计,网络芯片W5500等,这些都是使用SPI接口,不过驱动的实现涉及video显示,网络network,字符设备等。SPI只是物理接口,SPI框架也只是实现驱动到物理器件的访问,对于如何添加到内核,实现应用层的访问,就需要具体问题具体分析,通过对应的驱动,最终实现功能。
return_back
直接开始下一节说明: iio子系统驱动框架和ADC模块驱动