build_embed_linux_system
regulator电源管理模块
随着芯片的性能需求越来越高,高性能、高集成的多核心SOC成为主流;主频和面积的提升,功耗和发热也更加严重。依靠传统的内部功率模块管理模块电源的方式,已经无法满足新的需求。为了优化电源管理,SOC常常包含数十个独立供电域,来提供精确的电源控制。高端的SOC往往需要内部的PMU和外部的PMIC电源管理芯片共同进行精细化的模块电压电流控制,这就对软件控制带来了更高的要求。regulator模块正是在这一背景下实现的,用来适配越来越复杂的电源管理需求。
regulator模块作为linux内核中用于管理电源的子系统;提供一套接口用于对电源管理模块进行操作,并定义获取电源硬件信息的一些基本接口。regulator模块的基本功能如下所示。
- 电源调节控制,支持动态电压/电流调整,提供使能控制接口,实现软启动与关断时序管理。
- 管理电源的拓扑关系,支持树状的的电源供应结构,管理访问电源的设备列表,处理多电源耦合关系。
- 状态监控保护,提供互斥访问机制,异常状态检测,提供保护机制。
完整的regulator的框架如下所示。
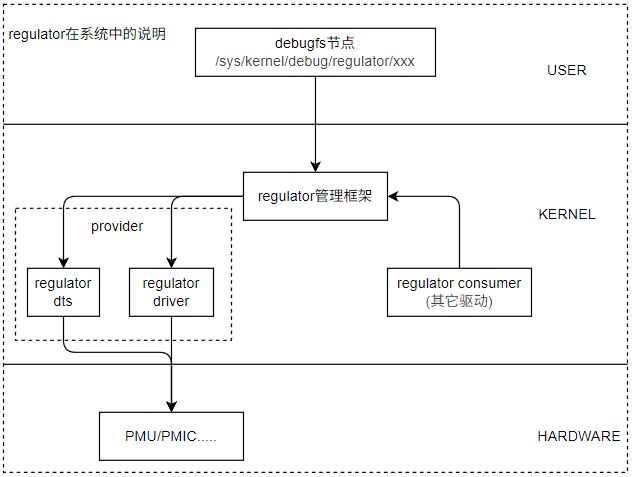
具体说明如下。
- regulator framework: 提供了regulator的框架,包含regulator注册的接口定义,提供regulator provider注册接口,以及regulator consumer的访问接口。
- regulator provider: 注册regulator器件的接口,可以是具体的控制硬件;如内部的PMU模块,外部的PMIC模块,或者仅控制电源开关的GPIO引脚都可。
- regulator consumer: 访问regulator provider的接口,用于获取regulator provider提供的电源信息;例如ADC,USB,CAN等,都依赖于特定的电源域的管理。
- PMU/PMIC: 具体的管理电源的硬件,当consumer控制模式,使能或者设置限制时,会修改相应的PMU或PMIC硬件状态,从而控制系统的电压或电流。
这些模块共同构成regulator的框架,模块很多也比较难理解,学习Linux系统中regulator下的驱动就更复杂了。其实有更简单的办法,从需求的角度反而更简单;本质上我们需要一套能够管理设备硬件开关、电压、电流的机制;而且相应电源可能提供多个模块用于满足工作,保证系统不会错误的关闭,导致部分模块失效,regulator正是满足这个需求设定出来的。按照这个逻辑,regulator provider是管理设备电源的结构,regulator consumer是访问设备电源的结构,regulator framework是关联和管理电源的框架,这样统筹起来就能满足电源的管理需求。
这里以简单的例子进行说明,使用I/O控制3.3V电源开关。这是简单的需求,稍有经验的工程师应该就能实现,设备树中声明I/O的pinctrl和gpio;在驱动加载时打开I/O,移除时关闭I/O就能够控制,并不困难。不过如果这个I/O控制的3.3V电源给两个设备供电?第一个驱动申请了I/O,进行了控制,第二个驱动时I/O已经被占用了,此时就不能控制了,那么有没有实现的办法呢?当然是有的,将对I/O控制部分提取出来,单独注册驱动,内部计数进行限制管理;然后再请求的驱动中提供接口进行控制,这样就可以正确控制了。有没有觉得眼熟?是的,regulator正是基于这个逻辑实现的,电压,电源,开关注册实现的regulator provider正是单独驱动实现注册的,而访问的驱动正是regulator consumer;依照这个可以为学习regulator提供一个新的思路。下面开始讲解内核和驱动中的实现,具体目录如下所示。
regulator_provider
regulator_provider作为电源管理的提供者,需要理解以下知识点。
- regulator框架提供注册/移除设备的接口。
- 描述电源管理芯片支持硬件功能的设备树节点说明。
- 匹配设备树节点,向内核注册相应节点的驱动。
具体内容如下所示。
regulator_provider_interface
regulator作为管理系统电源模块的框架,主要接口如下所示。
// regulator注册管理相关代码
// 注册regulator
// @dev: regulator对应的设备节点
// @regulator_desc: regulator的描述信息
// @config: regulator的配置信息
struct regulator_dev *regulator_register(struct device *dev, const struct regulator_desc *regulator_desc,
const struct regulator_config *config);
// 解除regulator注册
// @rdev: 要解除注册的regulator设备
void regulator_unregister(struct regulator_dev *rdev);
这个接口包含三个关键的结构体,分别是regulator_desc、regulator_config和regulator_dev;具体描述如下所示。
- regulator_desc结构体,描述regulator的基本信息,包含regulator的名字、供电源名字、设备树匹配字符串、regulators节点、设备树解析回调函数、id、类型、拥有该regulator的内核模块指针等。
enum regulator_type {
REGULATOR_VOLTAGE, // 电压 regulator
REGULATOR_CURRENT, // 电流 regulator
};
//regulator_desc结构体,描述regulator的基本信息
struct regulator_desc {
const char *name; // regulator的名字
const char *supply_name; // regulator的供电源名字
const char *of_match; // 用于设备树匹配的字符串,用于在设备树中找到对应的regulator节点
bool of_match_full_name; // 是否使用完整的设备树匹配字符串进行匹配
const char *regulators_node; // 指向设备树中regulators节点的名称,用于关联regulator设备
int (*of_parse_cb)(struct device_node *, // 设备树解析回调函数,用于解析设备树节点并填充regulator配置信息
const struct regulator_desc *,
struct regulator_config *);
int id; // 必要信息,regulator的唯一标识符
unsigned int continuous_voltage_range:1; // 标志位,指示电压范围是否连续,1 表示连续,0 表示离散
unsigned n_voltages; // 必要信息,支持的离散电压值的数量
unsigned int n_current_limits; // 支持的电流限制值的数量
const struct regulator_ops *ops; // 必要信息,指向regulator操作函数集合的指针,包含了调节电压、电流等操作函数
int irq; // regulator使用的中断号,如果没有则为 -1
enum regulator_type type; // 必要信息,regulator的类型,如电压或电流等
struct module *owner; // 拥有该regulator的内核模块指针
unsigned int min_uV; // 最小输出电压,单位为微伏(μV)
unsigned int uV_step; // 电压调节步进值,单位为微伏(μV)
unsigned int linear_min_sel; // 线性电压范围的最小选择值
int fixed_uV; // 固定输出电压值,单位为微伏(μV),如果为 -1 则表示非固定电压
unsigned int ramp_delay; // 电压斜坡上升或下降的延迟时间,单位为微秒(μs)
int min_dropout_uV; // 最小压差,单位为微伏(μV),即输入输出电压的最小差值
const struct linear_range *linear_ranges; // 指向线性电压范围数组的指针
const unsigned int *linear_range_selectors; // 指向线性电压范围选择器数组的指针
int n_linear_ranges; // 线性电压范围的数量
const unsigned int *volt_table; // 指向离散电压值表的指针
const unsigned int *curr_table; // 指向离散电流限制值表的指针
unsigned int vsel_range_reg; // 电压选择范围寄存器地址
unsigned int vsel_range_mask; // 电压选择范围寄存器掩码
unsigned int vsel_reg; // 电压选择寄存器地址
unsigned int vsel_mask; // 电压选择寄存器掩码
unsigned int vsel_step; // 电压选择寄存器的步进值
unsigned int csel_reg; // 电流选择寄存器地址
unsigned int csel_mask; // 电流选择寄存器掩码
unsigned int apply_reg; // 应用寄存器地址,用于使配置生效
unsigned int apply_bit; // 应用寄存器中的有效位
unsigned int enable_reg; // 使能寄存器地址
unsigned int enable_mask; // 使能寄存器掩码
unsigned int enable_val; // 使能寄存器的使能值
unsigned int disable_val; // 使能寄存器的禁用值
bool enable_is_inverted; // 使能信号是否反转,true 表示反转
unsigned int bypass_reg; // 旁路寄存器地址
unsigned int bypass_mask; // 旁路寄存器掩码
unsigned int bypass_val_on; // 旁路寄存器的开启值
unsigned int bypass_val_off; // 旁路寄存器的关闭值
unsigned int active_discharge_on; // 主动放电开启值
unsigned int active_discharge_off; // 主动放电关闭值
unsigned int active_discharge_mask; // 主动放电寄存器掩码
unsigned int active_discharge_reg; // 主动放电寄存器地址
unsigned int soft_start_reg; // 软启动寄存器地址
unsigned int soft_start_mask; // 软启动寄存器掩码
unsigned int soft_start_val_on; // 软启动寄存器的开启值
unsigned int pull_down_reg; // 下拉寄存器地址
unsigned int pull_down_mask; // 下拉寄存器掩码
unsigned int pull_down_val_on; // 下拉寄存器的开启值
unsigned int ramp_reg; // 斜坡寄存器地址
unsigned int ramp_mask; // 斜坡寄存器掩码
const unsigned int *ramp_delay_table; // 指向斜坡延迟时间表的指针
unsigned int n_ramp_values; // 斜坡延迟时间值的数量
unsigned int enable_time; // 使能regulator所需的时间,单位为微秒(μs)
unsigned int off_on_delay; // 从关闭到开启的延迟时间,单位为微秒(μs)
unsigned int poll_enabled_time; // 轮询regulator使能状态的时间间隔,单位为微秒(μs)
unsigned int (*of_map_mode)(unsigned int mode); // 设备树模式映射函数指针,用于将设备树中的模式映射为内部模式
};
//举例说明
static struct regulator_desc dcdc_desc = {
.name = "max8649", // regulator名称
.ops = &max8649_dcdc_ops, // regulator操作结构体指针
.type = REGULATOR_VOLTAGE, // regulator类型,这里为电压 regulator
.n_voltages = 1 << 6, // 电压数量,这里为 64 个
.owner = THIS_MODULE, // 模块拥有者,这里为当前模块
.vsel_mask = MAX8649_VOL_MASK, // 配置 voltage 选择的 mask
.min_uV = MAX8649_DCDC_VMIN, // 最小电压
.uV_step = MAX8649_DCDC_STEP, // 电压的步进
.enable_reg = MAX8649_CONTROL, // 配置 enable 的寄存器
.enable_mask = MAX8649_EN_PD, // 配置 enable 的 mask
.enable_is_inverted = true, // enable 的 invert
};
- regulator_config配置, 用于描述regulator的配置信息,包含设备节点、regulator的初始化数据、设备树节点、regmap等。
// regulator_config结构体,用于描述regulator的配置信息
struct regulator_config {
struct device *dev; // 指向与该regulator关联的设备节点的指针,用于表示该regulator所属的设备
const struct regulator_init_data *init_data; // 指向regulator初始化数据结构体的指针,包含regulator初始状态、电压范围等初始化配置信息
void *driver_data; // 驱动私有数据指针,可由驱动程序自定义使用,用于存储与该regulator相关的特定数据
struct device_node *of_node; // 指向设备树中该regulator对应节点的指针,用于从设备树获取regulator的相关配置信息
struct regmap *regmap; // 指向寄存器映射结构体的指针,用于通过统一接口访问regulator的硬件寄存器
struct gpio_desc *ena_gpiod; // 指向使能GPIO描述符的指针,用于控制regulator的使能状态
};
//举例说明
struct regulator_config config = { };
config.dev = &client->dev;
config.init_data = pdata->regulator;
config.driver_data = info;
config.regmap = info->regmap;
- regulator_dev结构体, 用于描述regulator的具体实现,包含regulator的描述信息、regulator的配置信息、regulator的状态信息、regulator的操作函数等。
// regulator_dev结构体,用于描述regulator的具体实现,包含其状态、配置、操作等信息
struct regulator_dev {
const struct regulator_desc *desc; // 指向regulator描述信息结构体的指针,包含regulator的基本属性
int exclusive; // 排他标志,用于表示该regulator是否为排他使用,非零值表示排他
u32 use_count; // regulator的使用计数,记录当前有多少地方正在使用该regulator
u32 open_count; // regulator的打开计数,记录该regulator被打开的次数
u32 bypass_count; // regulator的旁路计数,记录该regulator处于旁路模式的次数
struct list_head list; // 链表节点,用于将该regulator加入到所有regulator的链表中
struct list_head consumer_list; // 消费者链表头,用于管理该regulator供电的所有设备
struct coupling_desc coupling_desc; // 耦合描述信息结构体,用于描述该regulator与其他regulator的耦合关系
struct blocking_notifier_head notifier; // 阻塞通知器头,用于注册和通知感兴趣的事件
struct ww_mutex mutex; // 消费者锁,用于保护对该regulator消费者相关操作的互斥访问
struct task_struct *mutex_owner; // 持有消费者锁的任务结构体指针,记录当前持有锁的任务
int ref_cnt; // 引用计数,用于管理该regulator_dev结构体的生命周期
struct module *owner; // 拥有该regulator的内核模块指针
struct device dev; // 设备结构体,代表该regulator作为一个设备的相关信息
struct regulation_constraints *constraints; // 调节约束结构体指针,包含该regulator的调节限制条件
struct regulator *supply; // 电源供应regulator指针,用于构建电源供应树
const char *supply_name; // 电源供应的名称
struct regmap *regmap; // 寄存器映射结构体指针,用于访问该regulator的硬件寄存器
struct delayed_work disable_work; // 延迟工作队列项,用于延迟执行regulator的禁用操作
void *reg_data; // regulator_dev的私有数据指针,可由驱动自定义使用
struct dentry *debugfs; // debugfs目录项指针,用于在debugfs中创建调试接口
struct regulator_enable_gpio *ena_pin; // 使能GPIO结构体指针,用于控制regulator的使能状态
unsigned int ena_gpio_state:1; // 使能GPIO状态标志位,1 表示使能,0 表示禁用
unsigned int is_switch:1; // 开关标志位,1 表示该regulator是一个开关,0 表示不是
ktime_t last_off; // 记录该regulator最后一次被禁用的时间
int cached_err; // 缓存的错误码,用于保存最近一次操作的错误信息
bool use_cached_err; // 是否使用缓存错误码的标志位
spinlock_t err_lock; // 错误锁,用于保护对缓存错误码的并发访问
};
上述就是实现regulator注册的结构体,这部分往往由厂商实现驱动代码,在系统中注册相应的regulator设备,供其它驱动使用。regulator注册相关的驱动可以参考内核”drivers/regulator/”目录下的实现,相关文档可以参考”Documentation/power/regulator”目录下的说明。
regulator_provider_dts
regulator模块设计和芯片息息相关,因此一般由芯片供应商提供相应的设备树和驱动。这里以I.MX6ULL中的regulator-peri-3v3为例,说明其设备树和驱动实现。
// regulator_vref_adc设备节点
regulator_vref_adc: regulator@2 {
compatible = "regulator-fixed"; // 设备树标签,驱动匹配时使用,这里表示电压固定
regulator-name = "VREF_3V"; // regulator别名,注册到系统中使用
regulator-min-microvolt = <3300000>; // 最小电压
regulator-max-microvolt = <3300000>; // 最大电压
regulator-always-on; // 始终开启
};
对于设备树节点,主要包含以下几个部分。
- compatible: 设备树节点的兼容字符串,用于识别该设备树节点。
- gpio: 引脚配置,对于部分I/O控制的电源模块,gpio引脚用于控制电源模块的开关。
- regulator配置: 指定电源模块的配置信息,包括电源模块的名称、最小电压、最大电压、是否总是开启等。
当然,这里有些特殊控制参数。
- regulator-boot-on: 模块是否在启动时默认开启。
- regulator-always-on: 模块是否总是开启,带有该参数后,模块将不会根据系统状态进行开关控制。
regulator_provider_driver
对于regulator的驱动,在内核中已经实现,详细参考内核代码: “drivers/regulator/fixed.c”;具体文件如下所示。
对于文件解析,主要包含以下几个部分。
- 匹配设备树节点,注册驱动的代码实现。
// 设备树节点匹配参数
static struct platform_driver regulator_fixed_voltage_driver = {
.probe = reg_fixed_voltage_probe,
.driver = {
.name = "reg-fixed-voltage",
.of_match_table = of_match_ptr(fixed_of_match),
.pm = ®_fixed_voltage_pm_ops,
},
};
// 注册驱动,执行设备树节点匹配对应的probe函数
static int __init regulator_fixed_voltage_init(void)
{
return platform_driver_register(®ulator_fixed_voltage_driver);
}
subsys_initcall(regulator_fixed_voltage_init);
// 驱动注销
static void __exit regulator_fixed_voltage_exit(void)
{
platform_driver_unregister(®ulator_fixed_voltage_driver);
}
module_exit(regulator_fixed_voltage_exit);
// 模块信息
MODULE_AUTHOR("Mark Brown <broonie@opensource.wolfsonmicro.com>");
MODULE_DESCRIPTION("Fixed voltage regulator");
MODULE_LICENSE("GPL");
MODULE_ALIAS("platform:reg-fixed-voltage");
- 解析设备树节点,获取相应的配置信息
static struct fixed_voltage_config *
of_get_fixed_voltage_config(struct device *dev,
const struct regulator_desc *desc)
{
struct fixed_voltage_config *config;
struct device_node *np = dev->of_node;
struct regulator_init_data *init_data;
// 申请regulator管理数据控制
config = devm_kzalloc(dev, sizeof(struct fixed_voltage_config),
GFP_KERNEL);
if (!config)
return ERR_PTR(-ENOMEM);
// 获取regulator_init_data数据,包含通用配置信息,详细参考/drivers/regulator/of_regulator.c
// regulator-min-microvolt: 最小电压
// regulator-max-microvolt: 最大电压
// regulator-boot-on: 模块是否在启动时默认开启
// regulator-always-on: 模块是否总是开启
// regulator-pull-down: 模块是否需要下拉
config->init_data = of_get_regulator_init_data(dev, dev->of_node, desc);
if (!config->init_data)
return ERR_PTR(-EINVAL);
init_data = config->init_data;
init_data->constraints.apply_uV = 0;
// 初始化模块配置信息(名称,电压)
// 固定电压要求模块电压上限和下限一致
config->supply_name = init_data->constraints.name;
if (init_data->constraints.min_uV == init_data->constraints.max_uV) {
config->microvolts = init_data->constraints.min_uV;
} else {
dev_err(dev,
"Fixed regulator specified with variable voltages\n");
return ERR_PTR(-EINVAL);
}
// 是否启动时开启
if (init_data->constraints.boot_on)
config->enabled_at_boot = true;
of_property_read_u32(np, "startup-delay-us", &config->startup_delay);
of_property_read_u32(np, "off-on-delay-us", &config->off_on_delay);
// 是否为输入源
if (of_find_property(np, "vin-supply", NULL))
config->input_supply = "vin";
return config;
}
- 根据配置信息,完善regulator_desc和regulator_config结构体,注册regulator设备
struct fixed_voltage_data *drvdata;
struct regulator_config cfg = { };
// 申请管理regulator的驱动设备
drvdata = devm_kzalloc(&pdev->dev, sizeof(struct fixed_voltage_data),
GFP_KERNEL);
if (!drvdata)
return -ENOMEM;
//......
// 初始化drvdata->desc结构体
drvdata->desc.name = devm_kstrdup(&pdev->dev,
config->supply_name,
GFP_KERNEL);
if (drvdata->desc.name == NULL) {
dev_err(&pdev->dev, "Failed to allocate supply name\n");
return -ENOMEM;
}
drvdata->desc.type = REGULATOR_VOLTAGE;
drvdata->desc.owner = THIS_MODULE;
//......
// 获取GPIO资源
cfg.ena_gpiod = gpiod_get_optional(&pdev->dev, NULL, gflags);
if (IS_ERR(cfg.ena_gpiod))
return dev_err_probe(&pdev->dev, PTR_ERR(cfg.ena_gpiod),
"can't get GPIO\n");
cfg.dev = &pdev->dev;
cfg.init_data = config->init_data;
cfg.driver_data = drvdata;
cfg.of_node = pdev->dev.of_node;
// 向系统注册regulator设备,用于其它设备访问
drvdata->dev = devm_regulator_register(&pdev->dev, &drvdata->desc,
&cfg);
if (IS_ERR(drvdata->dev)) {
ret = dev_err_probe(&pdev->dev, PTR_ERR(drvdata->dev),
"Failed to register regulator: %ld\n",
PTR_ERR(drvdata->dev));
return ret;
}
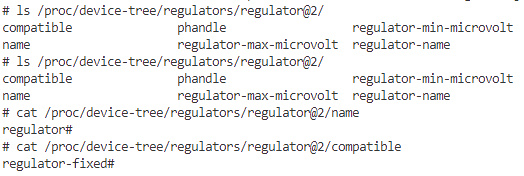
对于已经注册到内核regulator设备,可以通过设备树查看相应的设备树节点。也可以通过debugfs节点查看相应的设备文件。
- 查看regulator设备树节点
# 查看regulator设备树节点
$ cat /proc/device-tree/regulators/regulator@2
- 查看debugfs中的regulator设备文件
# 挂载debugfs目录
mount -t debugfs none /sys/kernel/debug
# 查看regulator设备文件
ls /sys/kernel/debug/regulator/VREF_3V/
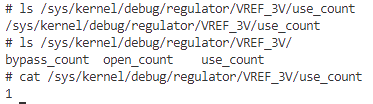
在调试信息中,有一个重点信息use_count,表示当前执行了多少次开启regulator动作;当use_count为0时,此时regulator_enable会开启访问硬件驱动,大于0时则只增加计数。use_count大于1时,此时regulator_disable只减少计数,等于1时,才会真正的关闭。对于regulator只被一个模块使用,可以通过regulator_is_enable判断是否执行开启和关闭执行。如果regulator被多个模块使用,则比较复杂,此时可直接使用regulator-always-on和regulator-boot-on来保证模块供电正常。
至此,关于如何在系统注册regulator设备的功能说明完毕,下面讲解在其它设备驱动中如何使用已经注册到内核regulator设备。
regulator_consumer
和regulator_provider类似,作为使用regulator的应用,其需要理解以下知识点。
- 访问regulator设备的接口。
- 引用regulator资源的设备树节点。
- 使用regulator设备节点资源的驱动。
具体内容如下所示。
regulator_consumer_interface
和pwm,iio这些框架类似,regulator主要的功能是作为provider,提供接口给其它驱动使用,这部分的相关接口如下所示。
//根据ID获取已经注册的regulator(devm_regulator_get)
//@dev: regulator所属的设备
//@id: regulator在设备树中的标签值,匹配设备树节点中的xxx-regulator标签
//返回值: 成功返回regulator指针,失败返回NULL
struct regulator *regulator_get(struct device *dev, const char *id);
//释放已经获取的regulator
//@regulator: 已经获取的regulator
void regulator_put(struct regulator *regulator);
//使能regulator
//@regulator: 要使能的regulator
//返回值: 成功返回0,失败返回错误码
int regulator_enable(struct regulator *regulator);
// 获取regulator使能状态
// @regulator: 要获取状态的regulator
// 返回值: 使能返回1,其它返回0
int regulator_is_enabled(struct regulator *regulator);
// 关闭regulator
// @regulator: 要关闭的regulator
// 返回值: 成功返回0,失败返回错误码
int regulator_disable(struct regulator *regulator);
// 设置regulator电压,相同时设置电压值,不同时设置电压范围
// @regulator: 要设置电压的regulator
// @min_uV: 最小电压值,单位为微伏(μV)
// @max_uV: 最大电压值,单位为微伏(μV)
// 返回值: 成功返回0,失败返回错误码
int regulator_set_voltage(struct regulator *regulator, int min_uV, int max_uV);
// 获取regulator电压
// @regulator: 要获取电压的regulator
// 返回值: 成功返回当前电压值,失败返回错误码
int regulator_get_voltage(struct regulator *regulator);
// 设置regulator电流限制
// @regulator: 要设置电流限制的regulator
// @min_uA: 最小电流限制值,单位为微安(μA)
// @max_uA: 最大电流限制值,单位为微安(μA)
// 返回值: 成功返回0,失败返回错误码
int regulator_set_current_limit(struct regulator *regulator, int min_uA, int max_uA);
// 获取regulator电流限制
// @regulator: 要获取电流限制的regulator
// 返回值: 成功返回当前电流限制值,失败返回错误码
int regulator_get_current_limit(struct regulator *regulator);
// 设置regulator工作模式
// @regulator: 要设置工作模式的regulator
// @mode: 工作模式,具体根据regulator的类型和支持的模式而定
// 返回值: 成功返回0,失败返回错误码
int regulator_set_mode(struct regulator *regulator, unsigned int mode);
// 获取regulator工作模式
// @regulator: 要获取工作模式的regulator
// 返回值: 当前工作模式,具体根据regulator的类型和支持的模式而定
unsigned int regulator_get_mode(struct regulator *regulator);
// 设置regulator事件通知函数
// @regulator: 要设置事件通知函数的regulator
// @nb: 事件通知函数指针,用于事件通知regulator的状态变化
int regulator_register_notifier(struct regulator *regulator,
struct notifier_block *nb);
// 取消regulator事件通知函数
// @regulator: 要取消事件通知函数的regulator
// @nb: 要取消的事件通知函数指针
int regulator_unregister_notifier(struct regulator *regulator,
struct notifier_block *nb);
上述就是regulator作为应用主要使用的接口,这部分的相关接口可以参考”Documentation/power/regulator/consumer.rst”文件中的说明。
regulator_consumer_app
regulator_consumer作为电源管理的消费者,是在驱动中经常使用得模块。使用regulator的操作比较简单,这里以引用regulator_vref_adc为例。
- 在设备树节点中引用指定的regulator节点。
//adc设备节点
&adc1 {
//......
vref-supply = <®ulator_vref_adc>; // 引用vref的设备节点
status = "okay";
};
- 驱动中获取regulator节点,进行处理。
// 获取电源管理相关信息,使能并获取基准电压
info->vref = devm_regulator_get(&pdev->dev, "vref");
if (IS_ERR(info->vref)) {
dev_err(&pdev->dev, "failed get vref regulator");
return PTR_ERR(info->vref);
}
// 使能regulator模块
ret = regulator_enable(info->vref);
if (ret) {
dev_err(&pdev->dev, "failed enable vref regulator");
return ret;
}
// 获取regulator节点的电压信息
info->vref_uv = regulator_get_voltage(info->vref);
这样在驱动中就可以使用vref_uv作为基准电压去进一步处理,这部分可以参考iio章节中关于ADC硬件的应用。
summary
在本章节中,以ADC中的基准电压为例,对于regulator模块进行说明;主要讲述了一下内容。
- regulator作为设备节点,如何以regulator provider的身份注册到内核中,并在系统中被调试访问。
- 讲述了驱动中访问regulator模块的接口,以及如何操作regulator硬件
这两部分通过regulator框架进行管理,最终实现了精细化的电压,电流的控制;也为其它模块的PM管理实现提供了相关接口。理解了regulator模块,对于系统精细化管控系统功耗,有着重要的意义。
return_back
直接开始下一节说明: 串口tty管理框架