build_embed_linux_system
pinctrl框架和gpio子系统
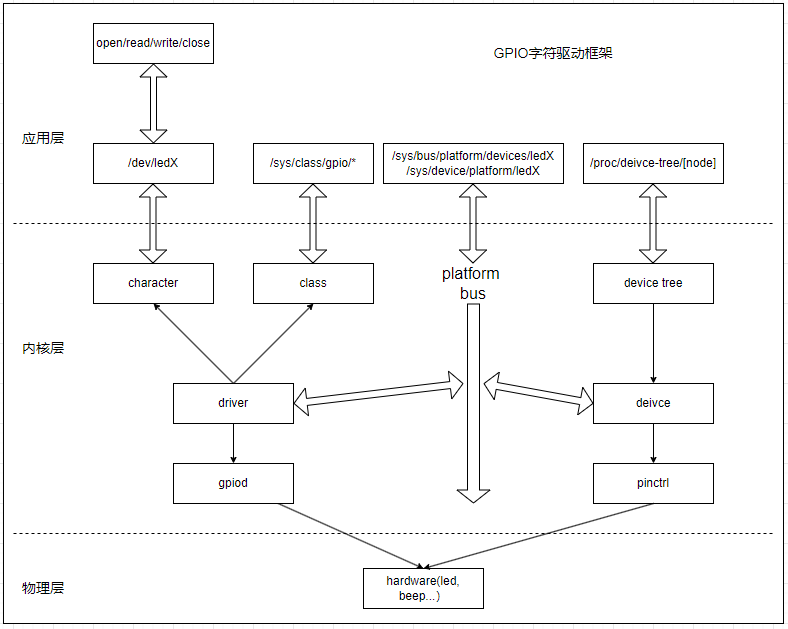
嵌入式Linux系统使用I/O与外界器件交互,简单的如GPIO、SPI、I2C,复杂的如CMOS、LCD-RGB、ETH、USB接口等,都是由I/O引脚来作为信号的输出或者输入接口。
对于SOC功能的复杂性,以及I/O数目的限制,每个引脚都可以复用成不同的功能。对于软件来说,这就需要一套机制来管理引脚的复用功能,pinctrl框架正是用来实现管理功能的。另外当引脚作为普通I/O时,又需要在驱动中控制引脚的输入输出,这就需要gpio子系统来实现对引脚电平的控制。
pinctrl和gpio子系统在Linux内核中相辅相成,共同完成对I/O引脚的管理工作。
- pinctrl框架主要用于管理配置引脚的复用和驱动能力,提供配置引脚的能力。主要包含复用功能、电气特性等。
- gpio子系统则通过封装的接口,管理引脚资源,提供驱动操作引脚的能力。
通过这两个框架的配合使用,可以说简化了驱动的开发;也避免了在代码中直接对寄存器的操作,更容易复用代码;同时降低了开发维护的难度,是目前驱动中涉及引脚的主要开发方式。
本节目录如下。
本章节快速学习知识点:
- pinctrl框架在设备树和驱动中应用。
- gpio子系统在设备树和驱动中应用。
- gpio模块在系统中操作接口。
pinctrl
pinctrl主要控制引脚的复用,和驱动中相关的pinctrl的接口如下所示。
| 功能步骤 | 功能接口 | 接口说明 |
|---|---|---|
| 获取pinctrl资源 | devm_pinctrl_get | 用于获取I/O引脚的pinctrl-x对应的所有资源列表 |
| devm_pinctrl_get_select | 用于获取I/O引脚的pinctrl-x对应的资源列表,并同时选择name指定的资源 | |
| 获取pinctrl-name对应状态 | pinctrl_lookup_state | 从pinctrl资源中根据名称获取pinctrl-name对应的资源信息 |
| 设置pinctrl状态 | pinctrl_select_state | 设置pinctrl配置信息 |
| 释放pinctrl资源 | devm_pinctrl_put | 释放获取I/O引脚的pinctrl资源 |
具体功能接口如下所示。
// 获取I/O引脚的pinctrl资源列表,对应设备树中的pinctrl-x变量
// @dev: 设备结构体
// @return: pinctrl资源结构体指针
struct pinctrl *devm_pinctrl_get(struct device *dev)
// 用于获取I/O引脚的pinctrl-x对应的资源列表,并同时切换name指定的配置
// 相当于devm_pinctrl_get和pinctrl_select_state的组合
// @dev: 设备结构体
// @name: pinctrl-name对应的名称
// @return: pinctrl资源结构体指针
static inline struct pinctrl * __must_check devm_pinctrl_get_select(struct device *dev, const char *name)
// 根据名称获取pinctrl状态配置
// @p: pinctrl资源结构体指针
// @name: pinctrl-name对应的名称
// @return: pinctrl状态结构体指针
struct pinctrl_state *pinctrl_lookup_state(struct pinctrl *p, const char *name)
// 设置pinctrl配置信息
// @p: pinctrl资源结构体指针
// @state: pinctrl状态结构体指针
// @return: 0成功,其他失败
int pinctrl_select_state(struct pinctrl *p, struct pinctrl_state *state)
// 释放获取I/O引脚的pinctrl资源(devm申请资源可自动释放)
// @p: pinctrl资源结构体指针
// @return: 无
void devm_pinctrl_put(struct pinctrl *p)
pinctrl主要工作在内核解析设备树的过程,来控制引脚的复用功能。不同厂商在设备树中的引脚pinctrl定义有区别,这里以I.MX6ULL为例,设备树中以pinctrl的定义以iomux和iomuxc_snvs节点显示,实现支持pinctrl切换功能的设备树和应用接口。
关于pinctrl在设备树中实现,具体示例如下所示。
iomuxc: pinctrl@20e0000 {
compatible = "fsl,imx6ul-iomuxc"; //属性标签,驱动匹配加载
reg = <0x020e0000 0x4000>; //定义iomuxc管理寄存器范围
};
&iomuxc {
pinctrl_led_improve: led-improve {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x40017059 //定义引脚的复用类型和性能,详细见后续说明
>;
};
pinctrl_loopled: gpio-loopleds {
fsl,pins = <
MX6UL_PAD_CSI_DATA00__GPIO4_IO21 0x17059
MX6UL_PAD_CSI_DATA02__GPIO4_IO23 0x17059
MX6UL_PAD_CSI_DATA04__GPIO4_IO25 0x17059
>;
};
}
usr_led {
//.....
pinctrl-names = "default", "improve"; //用于pinctrl查找state的名称,默认是default
pinctrl-0 = <&pinctrl_gpio_led>; //第一组引脚复用功能指定的结构
pinctrl-1 =<&pinctrl_led_improve>; //第二组引脚复用功能指定的结构
};
/*
* The pin function ID is a tuple of
* <mux_reg conf_reg input_reg mux_mode input_val>
*/
#define MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x0068 0x02f4 0x0000 5 0
mux_reg:mux寄存器偏移地址,寄存器用于定义引脚的复用模式,寄存器地址(0x02290000+0x000C)
conf_reg:配置寄存器偏移地址,寄存器用于配置引脚的性能,寄存器地址(0x02290000+0x0050)
input_reg:input寄存器偏移地址,为0表示不存在
mux_mode:配置mux寄存器的值,0x5表示为引脚模式(详细看手册)
input_val:input寄存器不存在,配置0即可
/*
MX6ULL_PAD_SNVS_TAMPER1__GPIO5_IO01 <config_val>
*/
config_val:定义config寄存器的值
bit0: 引脚速度,0表示slow_field,1表示fast_field
bit3~5: 引脚驱动能力
- 000 DSE_0_output_driver_disabled
- 001 DSE_1_R0_260_Ohm___3_3V__150_Ohm_1_8V__240_Ohm_for_DDR
- 010 DSE_2_R0_2
- 011 DSE_2_R0_3
- 100 DSE_2_R0_4
- 101 DSE_2_R0_5
- 110 DSE_2_R0_6
- 111 DSE_2_R0_7
bit6-7:ready-only speed
bit-11: 开漏模式,0关闭开漏,1开漏模式
bit-12: Pull / Keep Enable Field,0表示关闭,1表示开启
bit-13: Pull / Keep Select Field,0表示Keeper,1表示Pull
bit14-15: Pull Up / Down Config. Field
- 00 PUS_0_100K_Ohm_Pull_Down — 100K Ohm Pull Down
- 01 PUS_1_47K_Ohm_Pull_Up — 47K Ohm Pull Up
- 10 PUS_2_100K_Ohm_Pull_Up — 100K Ohm Pull Up
- 11 PUS_3_22K_Ohm_Pull_Up — 22K Ohm Pull Up
bit16: Hyst. Enable Field,0:表示不开启I/O迟滞,1表示开启
bit17~bit31: Reserved
引脚的输入读取功能由SI_ON控制,
// driver/pinctrl/freescale/pinctrl-imx.c
// 函数: imx_pinctrl_parse_pin_mmio
// #define IMX_PAD_SION 0x40000000
if (config & IMX_PAD_SION)
pin_mmio->mux_mode |= IOMUXC_CONFIG_SION;
pin_mmio->config = config & ~IMX_PAD_SION;
// 根据I/O config的说明即可定义寄存器值,这部分主要影响设备功耗,I/O状态。
关于pinctrl的注册流程详细可看”drivers/pinctrl/freescale/”目录中的实现。
这里还是从驱动应用的角度讲解说明。pinctrl的主要应用是在驱动中修改引脚的复用功能,详细接口说明如下。
struct pinctrl_state {
struct list_head node;
const char *name; // pinctrl的name解析,对应pinctrl-names中的单个字符串
struct list_head settings; // pinctrl的具体配置解析,对应pinctrl-0,...的配置
};
struct pinctrl {
struct list_head node; // pinctrl全局列表
struct device *dev; // 使用pinctrl资源的设备节点指针
struct list_head states; // 设备状态列表
struct pinctrl_state *state; // pinctrl的状态列表(解析设备树获得)
struct list_head dt_maps; // 从设备树解析的设备表块
struct kref users; // 使用pinctrl资源被引用的个数
};
以上面的设备树为例,支持pinctrl的例程如下所示。
/* 获取pinctrl结构 */
chip->led_pinctrl = devm_pinctrl_get(&pdev->dev);
/* 获取state结构 */
chip->pinctrl_state[0] = pinctrl_lookup_state(chip->led_pinctrl, "default");
chip->pinctrl_state[1] = pinctrl_lookup_state(chip->led_pinctrl, "improve");
/* 选择default对应的pinctrl */
pinctrl_select_state(chip->led_pinctrl, chip->pinctrl_state[0]);
/* 选择improve对应的pinctrl */
pinctrl_select_state(chip->led_pinctrl, chip->pinctrl_state[1]);
gpio
对于大部分驱动来说,pinctrl负责管理I/O的复用、如上下拉、驱动能力等;一般在初始化后基本不需要修改。gpio则负责控制引脚的输入/输出、高低电平;驱动中可以直接使用此资源来设置I/O电平或者读取I/O状态。
驱动有多种方式从设备树中获取gpio资源的接口,其中最常见的就是gpio_xx和gpiod_xx接口。从功能上来说,gpio和gpiod都能实现配置引脚输入输出状态和控制引脚的功能;不过gpio属于旧版本Linux的接口,gpiod则是较新内核引入的新的API接口。
注:gpiod_xx接口支持设备树中通过GPIO_ACTIVE_XXX来控制逻辑电平和实际电平的关系。gpio接口在新版本中虽然仍存在,不过底层使用gpiod_set/get_raw_value实现,不受此选项影响。
关于gpio的主要接口说明如下。
| 接口名称 | 功能 |
|---|---|
| gpio interface | |
| of_get_named_gpio | 获取gpio在内核中的编号 |
| devm_gpio_request | 根据编号从内核申请gpio资源 |
| devm_gpio_request_one | 从内核申请gpio资源,同时配置gpio |
| gpio_direction_output | 设置引脚为输出状态 |
| gpio_direction_input | 设置引脚为输入状态 |
| gpio_set_value | 设置gpio引脚状态 |
| gpio_get_value | 获取gpio状态 |
| gpiod interface | |
| devm_gpiod_get | 获取gpio中第一个资源,不存在返回错误码 |
| devm_gpiod_get_optional | 获取gpio中第一个资源,不存在返回NULL |
| devm_gpiod_get_array | 获取gpio资源数组,失败返回错误码 |
| devm_gpiod_get_array_optional | 获取gpio资源数组,失败返回NULL |
| devm_gpiod_get_index | 获取gpio中指定标签的资源 |
| devm_gpiod_put | 释放获取的gpio资源 |
| gpiod_direction_input | 设置引脚为输入状态 |
| gpiod_direction_output | 设置引脚为输出状态 |
| gpiod_set_value | 设置引脚状态 |
| gpiod_set_value_cansleep | 设置引脚状态,支持休眠 |
| gpiod_get_value | 获取引脚状态,基于GPIO_Active配置的逻辑值 |
| gpiod_set_raw_value | 设置引脚状态,无视GPIO_Active配置 |
| gpiod_get_raw_value | 获取引脚状态,无视GPIO_Active配置 |
关于GPIO模块在设备树中的实现和访问如下所示。
//设备树格式
usr_led {
//......
led-gpios = <&gpio1 3 GPIO_ACTIVE_LOW>; //gpio资源: 所属GPIO控制器 GPIO引脚编号 GPIO逻辑1时物理电平(gpiod接口有效)
status = "okay";
};
/*
GPIO_ACTIVE_HIGH = (0 << 0), //常用,逻辑1对应高电平
GPIO_ACTIVE_LOW = (1 << 0), //常用,逻辑1对应低电平
GPIO_OPEN_DRAIN = (1 << 1), //开漏输出模式
GPIO_OPEN_SOURCE = (1 << 2), //开源输出模式
GPIO_PERSISTENT = (0 << 3), //保持状态,在挂起/恢复期间,GPIO线保持其值
GPIO_TRANSITORY = (1 << 3), //瞬态状态,在挂起/恢复期间,GPIO线可能失去其电气状态
GPIO_PULL_UP = (1 << 4), //引脚上拉
GPIO_PULL_DOWN = (1 << 5), //引脚下拉
GPIO_PULL_DISABLE = (1 << 6), //不使用上下拉
*/
// 获取gpio资源描述符,获取第一个(对应con_id-gpios属性)
// @dev: 管理gpio资源的设备,一般为总线匹配的设备
// @con_id: gpio属性id名称,"led"表示led-gpios属性,如果为NULL则表示gpios属性
// @flags: 获取GPIO状态
// GPIOD_ASIS 默认状态
// GPIOD_IN 输入状态
// GPIOD_OUT_LOW 输出状态,默认输出为0
// GPIOD_OUT_HIGH 输出状态,默认输出为1
// GPIOD_OUT_LOW_OPEN_DRAIN 输出状态,开漏模式,默认输出0
// GPIOD_OUT_HIGH_OPEN_DRAIN 输出状态,开漏模式,默认输出1
// @return: gpio资源描述符
struct gpio_desc *__must_check devm_gpiod_get(struct device *dev, const char *con_id, enum gpiod_flags flags)
// 获取gpio资源描述符(支持索引)
// @dev: 管理gpio资源的设备,一般为总线匹配的设备
// @con_id: gpio属性id名称,"led"表示led-gpios属性,如果为NULL则表示gpios属性
// @idx: gpio资源索引
// @flags: 获取GPIO状态
// @return: gpio资源描述符
struct gpio_desc *__must_check devm_gpiod_get_index(struct device *dev, const char *con_id, unsigned int idx, enum gpiod_flags flags)
// 获取gpio资源描述符数组
// @dev: 管理gpio资源的设备,一般为总线匹配的设备
// @con_id: gpio属性id名称,"led"表示led-gpios属性,如果为NULL则表示gpios属性
// @flags: 获取GPIO状态
// @return: gpio资源描述符数组
struct gpio_descs *__must_check devm_gpiod_get_array(struct device *dev,
const char *con_id,
enum gpiod_flags flags)
在gpio模块中,以下结构需要重点理解。
- struct gpio_device:gpio设备信息,表示具体的gpio设备节点
- struct gpio_desc:用于管理GPIO的资源描述符
//gpio device接口
struct gpio_device {
int id; //此GPIO设备所属gpiochip的编号,用于标识该GPIO设备在gpiochip中的位置
struct device dev; //指向该GPIO设备所属的通用设备结构体,关联了底层的硬件设
struct cdev chrdev; //该GPIO设备对应的字符设备,用于在用户空间和内核空间之间进行数据交互
struct device *mockdev; //指向该GPIO设备对应的模拟设备,可用于模拟GPIO功能,通常在测试或调试时使用。
struct module *owner; //指向拥有该GPIO设备的内核模块,表明哪个模块负责管理和操作这个GPIO设备。
struct gpio_chip *chip; //指向所属的gpiochip,如gpio1
struct gpio_desc *descs; //所属gpiochip管理的所有gpio描述符数组首指针
int base; //gpiochip的起始编号,即该gpiochip下第一个GPIO引脚的编号,用于计算其他引脚的编号。
u16 ngpio; //GPIO描述符数组指针内I/O数量,即该gpiochip所管理的GPIO引脚的总数
const char *label; //GPIO设备的描述名称,用于在日志或调试信息中标识该GPIO设备
void *data; //GPIO设备的私有数据指针,可用于存储与该GPIO设备相关的自定义数据
struct list_head list; //用于将该GPIO设备链接到GPIO设备链表中,方便内核统一管理和遍历所有GPIO设备。
struct blocking_notifier_head notifier; //阻塞通知头,用于注册和通知对该GPIO设备状态变化感兴趣的模块。
struct rw_semaphore sem; //读写信号量,用于保护对该GPIO设备的并发访问,确保数据的一致性
#ifdef CONFIG_PINCTRL
// 由pinctrl管理的引脚范围(仅在配置了PINCTRL时存在)
struct list_head pin_ranges;
#endif
};
//gpio_desc接口
struct gpio_desc {
struct gpio_device *gdev; // 指向所属的gpio设备
unsigned long flags; // 引脚状态,保存引脚的开漏、Active配置
const char *label; // 引脚的标签
const char *name; // gpio名称
#ifdef CONFIG_OF_DYNAMIC
// 所属的父设备节点
struct device_node *hog;
#endif
#ifdef CONFIG_GPIO_CDEV
// 去抖动时间(单位us)
unsigned int debounce_period_us;
#endif
};
基于上述结构体,内核提供控制引脚的输入输出和状态的接口,具体如下所示0。
// 设置gpio为输出引脚,并定义初始状态
// @desc: gpio描述符
// @value: 输出引脚状态
// @return: 0成功,其他失败
int gpiod_direction_output(struct gpio_desc *desc, int value)
// 设置gpio为输入引脚
// @desc: gpio描述符
// @return: 0成功,其他失败
int gpiod_direction_input(struct gpio_desc *desc);
// 设置gpio状态
// @desc: gpio描述符
// @value: 引脚状态
void gpiod_set_value(struct gpio_desc *desc, int value)
// 获取引脚状态,基于GPIO_Active配置的逻辑值
// @desc: gpio描述符
// @return: 引脚状态
int gpiod_get_value(const struct gpio_desc *desc)
对于gpio来说,还有个知识点就是关于of_get_named_gpio返回的编号值,有一套自己的计算方法。
以IMX6ULL为例,gpio的编号计算方法,具体方法如下所示。
- 确定所属的gpiochip,以I.MX6ULL为例,gpio1对应gpiochip0,依次类推。
- gpio编号的计算方式为
(chip_num)*32 + pin_num,转换成所属gpio则为(gpionum - 1)*32 + pin_num。 - 以led-gpios = <&gpio1 3 GPIO_ACTIVE_LOW>为例,则为
(1-1)*32 + 3 = 3。
注意:gpio编号仅用于老接口(of_get_named_gpio),gpiod接口无需关心gpio全局编号。
对于gpio和gpiod,虽然从原理上一样,不过实际应用中接口有差异,这里展示两类不同的gpio使用例程。
// gpio接口
// 1.从设备树中获取gpio编号
// 2.从内核中申请gpio编号对应的资源
// 3.设置gpio的方向
// 4.使用set/get命令操作gpio
chip->gpio = of_get_named_gpio(beep_nd, "beep-gpios", 0);
devm_gpio_request(&pdev->dev, chip->gpio, "beep")
gpio_direction_output(chip->gpio, 1);
gpio_set_value(chip->gpio, 0);
// gpiod接口
// 申请gpiod资源、配置gpio方向、设置gpio状态
chip->led_desc = devm_gpiod_get(&pdev->dev, "beep", GPIOD_OUT_LOW) //对应beep-gpios属性
可以看到,devm_gpiod_get方法,操作更加简洁,且能够于设备树中引脚ACTIVE状态进行联动处理;在驱动开发中,优先使用gpiod接口进行操作。
gpio_led_driver
在前面讲解了pinctrl框架和gpio子系统,也了解了gpio的知识,那么现在要开始以这些知识来实现基于设备树的LED驱动。
关于LED驱动,具体流程和步骤如下所示。
- 确定LED的硬件对应引脚、电平。
- 根据LED的引脚,确定pinctrl和gpio的设备树定义。
- 基于pinctrl和gpio接口,驱动实现控制LED硬件的接口。
- 配合设备树,添加内核加载驱动的接口。
- 创建字符设备,管理应用层访问到LED操作的接口。
dts_driver
这里以正点原子的阿尔法开发板为例,使用引脚为GPIO1_3,低电平点亮。
基于上述信息,设备树的定义如下所示。
- gpio是内部模块,没有具体总线,需要通过platform总线管理;定义在根节点或simple-bus等特殊节点(设备树章节有说明)。
- gpio作为设备节点,需要有两个最基本的属性,”compatible”和”status”;分别用于驱动匹配和设备状态管理。
- compatible,用于设备树匹配,这里compatible为”rmk,usr-led”。
- status为”okay”的节点才能被使用,也可以省略status,此时。
- gpio作为引脚功能,需要pinctrl定义引脚复用为I/O
- pinctrl-0、pinctrl-names,指定复用功能,如果只有一种复用,pinctl-names指定为default。
- gpio需要控制输入输出功能,需要指定[name]-gpios属性主要用于在驱动中使用devm_gpiod_get查询到指定gpio,控制输出电平;不过of_get_named_gpio这些老接口支持全名访问gpio资源,没有限制;不过这里还是建议所有gpio资源都使用”[name]-gpios=<…>”的格式。
- xxx-gpios,指定GPIO线号用于内核访问具体的gpio获取状态。
基于上述说明,LED的设备树的定义如下。
// 定义pinctrl的引脚复用
&iomuxc {
//....
pinctrl_gpio_led: gpio-leds {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x17059
>;
};
};
//创建LED节点,在platform总线管理下
gpiosgrp {
compatible = "simple-bus";
//..
usr_led {
compatible = "rmk,usr-led";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpio_led>;
led-gpios = <&gpio1 3 GPIO_ACTIVE_LOW>;
status = "okay";
};
//......
};
至于驱动的实现以及应用层的访问,和字符设备的说明基本一致。只是引入了复用功能切换,sysfs文件管理的相关内容。因此这里不重复说明。
详细的LED驱动和应用文件如下所示。
kernel_led
对于LED来说,内核支持leds模块,可以直接控制输出管理。
实现在内核代码路径:”drivers/leds/led-gpios.c”。
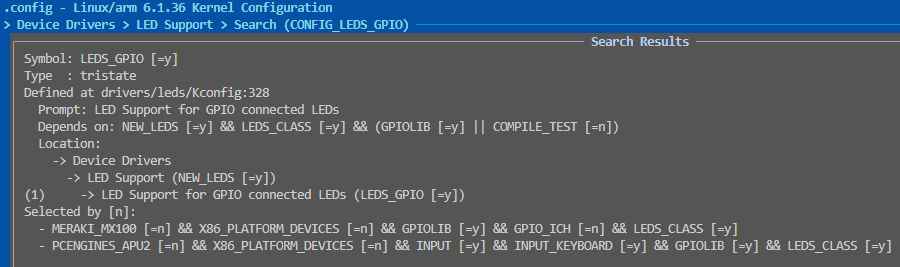
启用内核中LED模块,需要和支持的的配置选项如下所示。
# 配置支持LEDS模块
CONFIG_NEW_LEDS=y
CONFIG_LEDS_CLASS=y
CONFIG_GPIOLIB=y
CONFIG_LEDS_GPIO=y
具体路径为:Device Driver > LED Support > LED Support for GPIO connected LEDs。
对于设备树的实现,则如下所示。
//访问路径: /sys/class/leds/led-red, /sys/class/leds/led-green, /sys/class/leds/led-blue
&iomuxc {
//...
pinctrl_loopled: gpio-loopleds { //引脚复用功能
fsl,pins = <
MX6UL_PAD_CSI_DATA00__GPIO4_IO21 0x17059
MX6UL_PAD_CSI_DATA02__GPIO4_IO23 0x17059
MX6UL_PAD_CSI_DATA04__GPIO4_IO25 0x17059
>;
};
};
leds-gpio {
compatible = "leds-gpio"; // 标签,匹配驱动名称
pinctrl-names = "default"; // 复用别名,默认配置
pinctrl-0 = <&pinctrl_loopled>; // 指定引脚的复用功能
status = "okay"; // 模块状态,功能开启
led-red { // led-red节点
label = "led-red";
gpios = <&gpio4 21 GPIO_ACTIVE_HIGH>;
default-state = "off";
};
led-green { // led-green节点
label = "led-green";
gpios = <&gpio4 23 GPIO_ACTIVE_HIGH>;
default-state = "off";
};
led-blue { // led-blue节点
label = "led-blue";
gpios = <&gpio4 25 GPIO_ACTIVE_HIGH>;
default-state = "off";
};
};
代码里面查看如下所示。
static struct gpio_leds_priv *gpio_leds_create(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct fwnode_handle *child;
struct gpio_leds_priv *priv;
int count, ret;
// 获取子节点个数, 分配内存管理
count = device_get_child_node_count(dev);
if (!count)
return ERR_PTR(-ENODEV);
priv = devm_kzalloc(dev, struct_size(priv, leds, count), GFP_KERNEL);
if (!priv)
return ERR_PTR(-ENOMEM);
// 遍历字节点,获取LEDS数据
device_for_each_child_node(dev, child) {
struct gpio_led_data *led_dat = &priv->leds[priv->num_leds];
struct gpio_led led = {};
// 获取字节点的gpio数据
led.gpiod = devm_fwnode_get_gpiod_from_child(dev, NULL, child,
GPIOD_ASIS,
NULL);
if (IS_ERR(led.gpiod)) {
fwnode_handle_put(child);
return ERR_CAST(led.gpiod);
}
led_dat->gpiod = led.gpiod;
// 获取引脚的默认状态
led.default_state = led_init_default_state_get(child);
if (fwnode_property_present(child, "retain-state-suspended"))
led.retain_state_suspended = 1;
if (fwnode_property_present(child, "retain-state-shutdown"))
led.retain_state_shutdown = 1;
if (fwnode_property_present(child, "panic-indicator"))
led.panic_indicator = 1;
ret = create_gpio_led(&led, led_dat, dev, child, NULL);
if (ret < 0) {
fwnode_handle_put(child);
return ERR_PTR(ret);
}
/* Set gpiod label to match the corresponding LED name. */
gpiod_set_consumer_name(led_dat->gpiod,
led_dat->cdev.dev->kobj.name);
priv->num_leds++;
}
return priv;
}
// 获取引脚中的default-state默认状态
enum led_default_state led_init_default_state_get(struct fwnode_handle *fwnode)
{
const char *state = NULL;
if (!fwnode_property_read_string(fwnode, "default-state", &state)) {
if (!strcmp(state, "keep"))
return LEDS_DEFSTATE_KEEP;
if (!strcmp(state, "on"))
return LEDS_DEFSTATE_ON;
}
return LEDS_DEFSTATE_OFF;
}
在应用层,可以通过/sys/class/gpio/led-xxx/*进行处理。
# 打开LED-RED
echo 1 > /sys/class/leds/led-red/brightness
# 打开LED-GREEN
echo 1 > /sys/class/leds/led-green/brightness
# 打开LED-BLUE
echo 1 > /sys/class/leds/led-blue/brightness
具体操作显示如下所示。

gpio_sysfs
对于内核来说,提供了一套用于调试gpio的接口,通过/sys/class/gpio访问。
注意:能够被导出的接口不能在设备树中访问,否则会现实busy而无法导出。
- struct gpio_chip: gpio所属的控制器,带有gpio-controller的节点,可以在”/sys/class/gpio/”查看的节点
在/sys/class/gpio 中有3类入口:
- 用于在用户空间控制 GPIO 的控制接口
- GPIOs 本身
- GPIO 控制器(
gpio_chip实例)
控制接口是只写的:/sys/class/gpio/
export: 用户空间可以通过写其编号到这个文件,要求内核导出一个GPIO的控制到用户空间。例如: 如果内核代码没有申请GPIO #19,”echo 19>export”,将会在目录创建一个”gpio19”节点。unexport: 导出到用户空间的逆操作。例如: “echo 19>unexport” 将会移除使用”export”文件导出的 “gpio19” 节点。
注意: gpio编号的计算方法是gpio_N=(gpiochipN*32+gpio_pins)的位置,当然对于不同的芯片,也有每个控制器只有16位的情况。例如对于I.MX6ULL, GPIO1对应的控制器编号为0,GPIO2为1,依次类推
GPIO信号的路径这里参考/sys/class/gpio/gpio42/,并有如下的读/写属性:
direction: 读取得到in或out,有默认值,允许修改写入。写入out时,其引脚的默认输出为低电平。注意:如果内核不支持改变GPIO的方向,或者在导出时内核代码没有明确允许用户空间可以重新配置GPIO方向,那么这个属性将不存在。value: 读取得到0(低电平)或1(高电平)。如果GPIO配置为输出,这个值允许写操作。edge: 读取得到none、rising、falling或者both。将这些字符串写入这个文件可以选择沿触发模式,会使得轮询操作(select(2))在”value”文件中返回。这个文件仅有在这个引脚可以配置为可产生中断输入引脚时,才存在。active_low: 控制GPIO的极性,0为表示高电平有效,写入和读取输出实际电平,1表示低电平有效,写入和读取发生电平翻转。
这里以导出GPIO2_10(编号42)为例,导出命令如下。
# 导出引脚
echo 42 > /sys/class/gpio/export
# 设置引脚方向
echo in > /sys/class/gpio/gpio42/direction
# 设置引脚外部触发模式
echo rising > /sys/class/gpio/gpio42/edge
# 取消引脚导出
echo 42 > /sys/class/gpio/unexport
GPIO控制器的路径类似/sys/class/gpio/gpiochip42/(对于从#42 GPIO开始实现控制的控制器),并有着以下只读属性:
/sys/class/gpio/gpiochipN/
base: 与以上的N相同,代表此芯片管理的第一个GPIO的编号label: 用于诊断(并不总是只有唯一值)ngpio: 此控制器所管理的GPIO数量(而GPIO编号从N到N + ngpio -1)
从内核中导出gpio引脚的接口。
// 导出gpio到用户空间
// @gpio: gpio编号
// @direction_may_change: 是否允许用户空间改变引脚方向
// @return: 0成功,其他失败
int gpio_export(unsigned gpio, bool direction_may_change)
// 取消gpio的导出
// @gpio: gpio编号
// return: 无
void gpio_unexport(unsigned gpio)
// 创建一个sysfs连接到已导出的 GPIO 节点
// @dev: 设备
// @name: sysfs节点名称
// @gpio: gpio编号
// return: 0成功,其他失败
int gpio_export_link(struct device *dev, const char *name, unsigned gpio)
在内核申请一个gpio驱动后,可以通过gpio_export接口使其在sysfs接口/sys/class/gpio中可见,
summary
本节中主要介绍了pinctrl框架和gpio子系统内容,在I/O应用中它们相辅相成。驱动中pinctrl决定引脚连接到谁,gpio决定引脚输出什么;二者配合可以完成对驱动中大部分外设的初始化工作。