build_embed_linux_system
I2C设备和驱动管理框架
I2C是嵌入式系统中最常用通讯接口之一,常见的温湿度、距离传感器、EEPROM、RTC时钟器件都支持通过I2C接口进行通信。
在一主多从的硬件结构中,通过设备地址进行区分,只有地址匹配的从设备才会对主设备的请求进行应答;这样就实现总线上同时只有一对一的芯片通讯要求,也就可以同时挂载多个不同外部器件。这种设计也要求总线上不能有两个相同地址的从设备,否则会导致数据状态异常(总线上相同地址的设备会同时应答,导致主机无法区分数据来源,返回内容不一致时会产生总线冲突,甚至损坏器件)。如果设计需要挂载多个相同地址的器件,可以使用TCA9546A这类多路开关来实现I2C器件的挂载。
I2C的器件默认为开漏模式,需要通过外部上拉电阻实现高电平输出,更多适用与板级器件或芯片间的通讯。对于长距离通讯,需要外部电路去增强总线(如两端可以增加PCA9615这类单电源电平转换芯片增加可靠性),从而避免误码和错帧问题,这些在硬件设计时需要注意。
关于I2C设备和驱动模型,目录如下所示。
hw_driver_module
一个典型的I2C硬件拓扑如下所示。
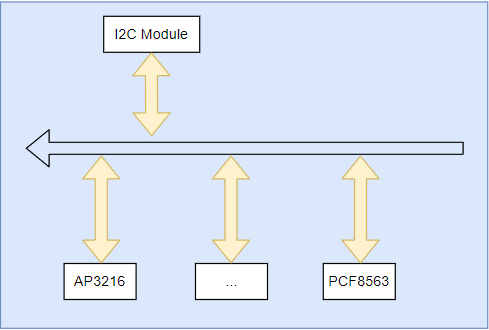
可以看到实现完整的I2C功能需要内部外设和外部器件功能实现。
对于SOC内部的I2C总线,需要实现以下功能。
- 配置模块对应的I/O引脚,复用成I2C模式
- 总线的时钟配置
- 总线工作模式配置
- 中断配置、基于总线的数据读取接口
对于标准I2C器件,则需要实现如下功能。
- 初始化器件,配置寄存器(如果需要)
- 实现读、写外部器件的接口
当然这是从硬件角度去理解驱动一个标准I2C器件需要实现的功能,那么在嵌入式Linux系统中,也是将硬件抽象成如下的实现。
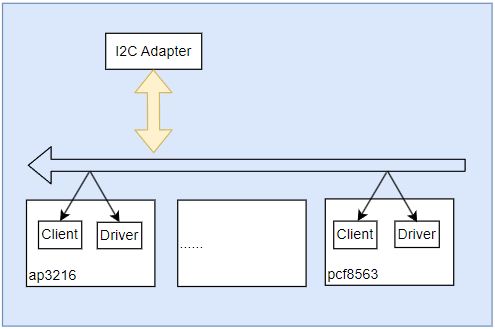
如上图所示,这里的i2c adpater就是内部外设总线控制器。对于I2C器件来说,外部器件的正常工作,需要I2C总线和器件的实现。I2C总线通过初始化内部模块实现,设备则是外部器件节点, 而驱动则主要是由用户开发,包含具体器件内部寄存器功能的应用实现。
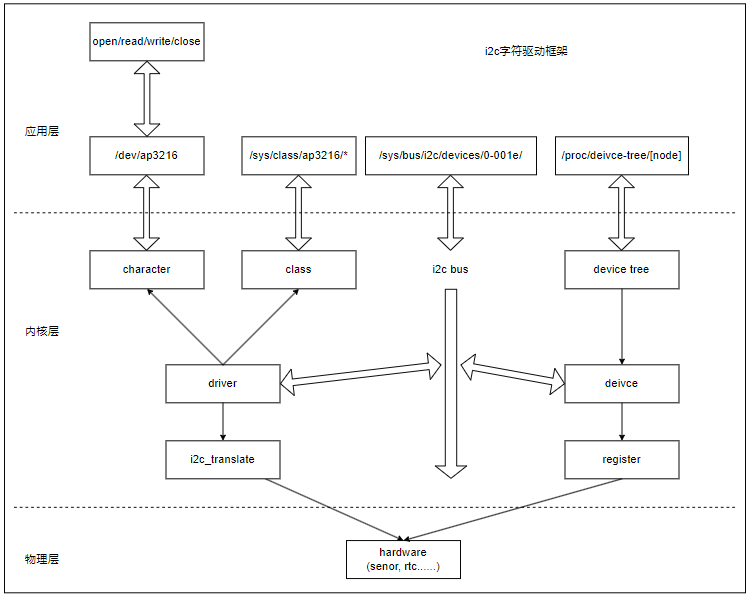
基于统一设备模型,完整的I2C总线和外设框架如下所示。
# i2c节点生成i2c总线
devicetree i2c-node => i2c bus => i2c adapter
# i2c器件节点生成i2c client
devcietree i2c-chip-node => i2c client
# i2c驱动
driver => 实现器件初始化和访问接口
一个完整的I2C驱动,包含I2C设备树节点、模块驱动(同时实现i2c总线)、器件节点和器件驱动。不过对于大部分SOC来说,本身厂商在发布SDK时,一定会支持I2C模块驱动,不需要开发,因此本节主要以器件驱动进行说明。
bus_adpater
前面提到,由设备树通过i2c adpater实现内部I2C模块驱动.
以I.MX6ULL的I2C1为例,节点信息如下。
//配置i2c工作引脚
pinctrl_i2c1: i2c1grp {
fsl,pins = <
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0
>;
};
i2c1: i2c@21a0000 {
// 定义子节点寄存器信息
#address-cells = <1>;
#size-cells = <0>;
// 匹配节点字符串
compatible = "fsl,imx6ul-i2c", "fsl,imx21-i2c";
// 配置I2C的寄存器
reg = <0x021a0000 0x4000>;
// I2C工作中断配置
interrupts = <GIC_SPI 36 IRQ_TYPE_LEVEL_HIGH>;
//i2c时钟使能和工作时钟
clocks = <&clks IMX6UL_CLK_I2C1>;
};
&i2c1 {
// 工作时钟
clock-frequency = <100000>;
// I2C工作引脚gpio子系统配置
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
// 节点使能
status = "okay";
};
可以看到,I2C模块工作需要的时钟,I/O,功能配置,中断触发都在设备树中进行相应的定义,那么这个节点是如何加入系统中的呢?
这里有个技巧,在kernel目录检索fsl,imx6ul-I2C或fsl,imx21-I2C,对应文件如下所示。
// 内核中匹配的i2c驱动文件
drivers/i2c/busses/i2c-imx.c
这就是官方实现的i2c adpater驱动实现。参考代码中框架可以发现i2c adpater由platform_driver_register进行注册,也就是说对于I2C模块,也被抽象成挂载在platform总线的设备。
关于I2C注册到内核中的代码,具体如下所示。
//drivers/i2c/busses/i2c-imx.c
//"fsl,imx6ul-i2c" 匹配i2c的列表
static const struct of_device_id i2c_imx_dt_ids[] = {
//...
{ .compatible = "fsl,imx6ul-i2c", .data = &imx6_i2c_hwdata, },
};
MODULE_DEVICE_TABLE(of, i2c_imx_dt_ids);
//寄存器资源,对应reg属性
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(base))
return PTR_ERR(base);
//时钟状态,并启动时钟,对应clks属性
i2c_imx->clk = devm_clk_get(&pdev->dev, NULL);
if (IS_ERR(i2c_imx->clk))
return dev_err_probe(&pdev->dev, PTR_ERR(i2c_imx->clk),
"can't get i2c clock\n");
ret = clk_prepare_enable(i2c_imx->clk);
//波特率,对应clock-frequency属性
i2c_imx->bitrate = I2C_MAX_STANDARD_MODE_FREQ;
ret = of_property_read_u32(pdev->dev.of_node,
"clock-frequency", &i2c_imx->bitrate);
if (ret < 0 && pdata && pdata->bitrate)
i2c_imx->bitrate = pdata->bitrate;
//中断处理,对应interrupts属性
ret = request_threaded_irq(irq, i2c_imx_isr, NULL,
IRQF_SHARED | IRQF_NO_SUSPEND,
pdev->name, i2c_imx);
if (ret) {
dev_err(&pdev->dev, "can't claim irq %d\n", irq);
goto rpm_disable;
}
//资源保存在adapter中,添加到系统中
strscpy(i2c_imx->adapter.name, pdev->name, sizeof(i2c_imx->adapter.name));
i2c_imx->adapter.owner = THIS_MODULE;
i2c_imx->adapter.algo = &i2c_imx_algo;
i2c_imx->adapter.dev.parent = &pdev->dev;
i2c_imx->adapter.nr = pdev->id;
i2c_imx->adapter.dev.of_node = pdev->dev.of_node;
i2c_imx->base = base;
ret = i2c_add_numbered_adapter(&i2c_imx->adapter);
if (ret < 0)
goto clk_notifier_unregister;
可以看到设备树非节点的配置向,会在此处进行处理,实现I2C模块的功能配置,也就是i2c-bus的功能实现。这部分就是内部模块的驱动,也是统一设备模型中总线的实现部分。另外,总线初始化完成后,会0在/sys/bus/下创建对应总线,并在/sys/bus/i2c/devices/中生成相应的器件节点,这样就可以在驱动中使用I2C总线接口来进行器件驱动的加载。
可通过如下命令,查看系统支持的I2C总线器件。
ls /sys/bus/i2c/devices/
具体显示如下所示。
可以看到,对于IMX6ULL来说,支持两条总线I2C0和I2C1。对于每条总线,又根据在设备树节点下的器件创建不同的设备节点,这些节点可通过reg属性进行区分和查看。
另外使用i2cdetect查看当前i2c总线上的设备。
# 显示系统当前支持的总线
i2cdetect -l
# 显示当前总线上挂载的设备(可以去/sys/bus下查看具体设备名称)
# i2cdetect -y [n]
i2cdetect -y 1
device_driver
内核中i2c控制器作为内部模块注册为i2c总线,挂载在总线上的器件注册为设备,这样再完成相应的驱动,既可以实现设备注册和访问的功能。
本节以ap3216c为例,说明如何实现i2c外部器件的驱动;主要包含如下内容。
- i2c总线驱动加载和数据传输的接口。
- i2c设备树节点的实现。
- i2c驱动代码实现。
i2c_interface
i2c驱动接口主要包含驱动加载、卸载和数据传输的接口,如下所示。
// 在i2c总线下加载i2c驱动
// @owner: 驱动的所有者,通常是使用THIS_MODULE宏
// @driver: 要加载的i2c驱动结构体指针
// @返回: 0表示加载成功,负数表示加载失败
#define i2c_add_driver(driver) \
i2c_register_driver(THIS_MODULE, driver)
int i2c_register_driver(struct module *owner, struct i2c_driver *driver);
// 移除已经加载的i2c驱动
// @driver: 已经加载的驱动结构体
void i2c_del_driver(struct i2c_driver *driver);
// 传输一或多组i2c数据,支持从器件读写数据
// @adap: i2c适配器,用于管理具体i2c总线的结构
// @msgs:i2c消息,包含要发送或接收的数据信息
// @num: 要传输的消息数量
// @返回: 成功传输的消息数量,负数表示传输错误
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num);
// i2c保存设备私有数据
// @client: i2c客户端,用于管理具体i2c器件的结构
// @data: 要保存的私有数据指针
void i2c_set_clientdata(struct i2c_client *client, void *data);
// i2c获取设备私有数据
// @client: i2c客户端,用于获取对应i2c器件的私有数据
// @返回: 指向私有数据的指针
void *i2c_get_clientdata(const struct i2c_client *client);
对于i2c中,最重要的就两个结构,如下所示。
- i2c_adapter: i2c模块总线适配器,内部i2c控制器管理结构(如i2c0, i2c1)。
- i2c_client: i2c器件,管理i2c上对应器件节点的结构(如ap3216a, pcf8573等)。
//i2c_adapter
struct i2c_adapter {
struct module *owner; // 适配器的所有者,用于管理模块的引用计数
unsigned int class; // 匹配加载的类设备对象,用于设备匹配
const struct i2c_algorithm *algo; // 访问总线的方法集合,关联到底层硬件的操作
void *algo_data; // 访问总线方法的私有数据,用于传递特定于算法的上下文
const struct i2c_lock_operations *lock_ops; // 指向I2C锁操作结构体的指针,用于管理I2C总线的访问锁
struct rt_mutex bus_lock; // 用于保护I2C总线访问的互斥锁,防止并发访问冲突
struct rt_mutex mux_lock; // 用于保护I2C多路复用器访问的互斥锁,防止并发访问冲突
int timeout; // 适配器通信超时时间,以jiffies为单位,用于控制通信的最大等待时间
int retries; // 适配器通信重试次数,用于在通信失败时进行重试
struct device dev; // 当前设备器所在的节点信息,包含设备的基本信息和操作函数
unsigned long locked_flags; // 由I2C核心管理的标志,用于表示设备的状态
#define I2C_ALF_IS_SUSPENDED 0
#define I2C_ALF_SUSPEND_REPORTED 1
int nr; // 设备的id编号,对应i2c设备,用于唯一标识I2C适配器
char name[48]; // 适配器名称,用于标识和调试
struct completion dev_released; // 用于同步设备释放的完成量,确保设备释放操作完成
struct mutex userspace_clients_lock; // 用于保护用户空间客户端列表的互斥锁,防止并发访问冲突
struct list_head userspace_clients; // 用户空间客户端列表,用于管理用户空间的I2C客户端
struct i2c_bus_recovery_info *bus_recovery_info; // 指向I2C总线恢复信息的指针,用于在总线故障时进行恢复
const struct i2c_adapter_quirks *quirks; // 指向I2C适配器特性结构体的指针,用于描述适配器的特殊行为或特性
struct irq_domain *host_notify_domain; // 指向主机通知中断域的指针,用于处理主机通知中断
struct regulator *bus_regulator; // 总线电源管理的指针,用于管理总线的电源
};
//i2c——client
struct i2c_client {
unsigned short flags; //i2c器件支持的功能位
#define I2C_CLIENT_PEC 0x04 /* Use Packet Error Checking */
#define I2C_CLIENT_TEN 0x10 /* we have a ten bit chip address */
#define I2C_CLIENT_SLAVE 0x20 /* we are the slave */
#define I2C_CLIENT_HOST_NOTIFY 0x40 /* We want to use i2c host notify */
#define I2C_CLIENT_WAKE 0x80 /* for board_info; true iff can wake */
#define I2C_CLIENT_SCCB 0x9000 /* Use Omnivision SCCB protocol */
unsigned short addr; //i2c器件地址,放置在低位(需要用到)
char name[I2C_NAME_SIZE]; //i2c器件名称
struct i2c_adapter *adapter; //i2c器件所属的总线适配器(需要用到)
struct device dev; //i2c器件所属的设备节点(如i2c下的ap3216节点)
int init_irq; //初始化设置的对应中断
int irq; //设备中i2c对应的irq中断线号
struct list_head detected; //i2c驱动成员
#if IS_ENABLED(CONFIG_I2C_SLAVE)
//从模式下的回调函数
i2c_slave_cb_t slave_cb;
#endif
void *devres_group_id; //探测设备时,为获取的资源创建的devres组Id。
};
chip_tree
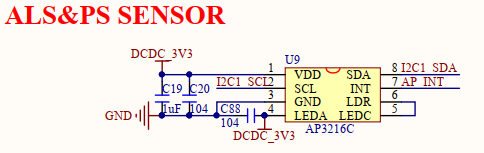
关于ap3216c的连接原理图如下所示。
其中通讯引脚为i2c1, AP_INT为中断引脚,连接I/O为GPIO1_1。i2c器件的地址为0x1e(参考datasheet),基于这些信息,i2c器件节点的设备树定义思路如下。
- ap3216器件物理上挂载在i2c1总线上,所以需要定义在i2c1总线节点内部。
- ap3216作为设备节点,需要有两个最基本的属性,”compatible”和”status”,分别用于驱动匹配和设备状态管理。
- compatible,用于设备树匹配,compatible为rmk,usr-beep。
- status为okay的节点才能被使用。
- ap3216需要有属性定义器件地址,通过reg属性定义,且节点名需要带地址信息。
- reg属性定义器件地址,按照i2c地址格式,为0x1e。
- ap3216除了连接i2c引脚外,还有一个中断引脚,需要定义中断I/O,其功能类似按键中断。需要三部分定义,复用功能pinctrl,引脚功能xxx-gpios和中断功能interrupts。
- pinctrl-0属性定义引脚配置,pinctrl-names属性定义引脚配置别名。
- int-gpios属性定义引脚I/O,支持访问引脚I/O。
- interrupts属性定义中断线号和中断类型,interrupt-parent属性定义引脚对应的中断控制器。
参考这个思路,ap3216的设备树的定义如下。
&iomuxc {
pinctrl_ap3216_tsc: gpio-ap3216 {
fsl,pins = <
MX6UL_PAD_GPIO1_IO01__GPIO1_IO01 0x40017059
>;
};
};
&i2c1 {
// ...
ap3216@1e {
compatible = "rmk,ap3216"; //compatible: 标签,用于spi总线匹配
reg = <0x1e>; //reg: i2c的寄存器地址, 总线加载器件时获取
rmk,sysconf = <0x03>; //rmk,sysconf: 自定义属性,用于定义配置寄存器的初始值
pinctrl-0 = <&pinctrl_ap3216_tsc>; //定义器件的中断I/O引脚配置
pinctrl-names = "default"; //定义器件的中断I/O引脚配置别名
interrupt-parent = <&gpio1>; //定义器件的中断I/O对应得中断控制器
interrupts = <1 IRQ_TYPE_EDGE_FALLING>; //定义I/O对应的中断线号和中断类型
int-gpios = <&gpio1 1 GPIO_ACTIVE_LOW>; //定义I/O引脚对应的GPIO
};
};
driver_probe
主要实现标准的驱动加载函数,并实现通过i2c总线加载和移除器件的接口。
//i2c驱动加载时执行的函数
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int result;
struct ap3216_data *chip = NULL;
struct device_node *np = client->dev.of_node;
u8 buf;
//1. 申请ap3216的管理资源
chip = devm_kzalloc(&client->dev, sizeof(struct ap3216_data), GFP_KERNEL);
if (!chip){
dev_err(&client->dev, "malloc error\n");
return -ENOMEM;
}
chip->client = client;
i2c_set_clientdata(client, chip);
//2. 在系统中创建字符设备,用于访问i2c硬件
result = i2c_device_create(chip);
if (result){
dev_err(&client->dev, "device create failed!\n");
return result;
}
//3. 硬件配置,设定工作能力
result = of_property_read_u32(np, "rmk,sysconf", &chip->sysconf);
if(result)
chip->sysconf = 0x03;
buf = 0x04; //reset ap3216
ap3216_write_block(client, AP3216C_SYSCONFG, &buf, 1);
mdelay(50);
buf = chip->sysconf; //enable ALS+PS+LR
ap3216_write_block(client, AP3216C_SYSCONFG, &buf, 1);
dev_info(&client->dev, "i2c driver init ok, sysconf:%d!\n", chip->sysconf);
return 0;
}
//i2c驱动移除时执行的函数
static void i2c_remove(struct i2c_client *client)
{
struct ap3216_data *chip = i2c_get_clientdata(client);
device_destroy(chip->class, chip->dev_id);
class_destroy(chip->class);
cdev_del(&chip->cdev);
unregister_chrdev_region(chip->dev_id, DEVICE_CNT);
}
//匹配设备树中compatible属性的列表
static const struct of_device_id ap3216_of_match[] = {
{ .compatible = "rmk,ap3216" },
{ /* Sentinel */ }
};
static struct i2c_driver device_driver = {
.probe = i2c_probe,
.remove = i2c_remove,
.driver = {
.owner = THIS_MODULE,
.name = "ap3216",
.of_match_table = ap3216_of_match,
},
};
static int __init ap3216_module_init(void)
{
return i2c_add_driver(&device_driver); //匹配i2c bus下的节点,通过ls /sys/bus/i2c/devices/查看
}
static void __exit ap3216_module_exit(void)
{
return i2c_del_driver(&device_driver);
}
//驱动加载和移除的必要宏
module_init(ap3216_module_init);
module_exit(ap3216_module_exit);
MODULE_AUTHOR("zc");
MODULE_LICENSE("GPL v2");
MODULE_DESCRIPTION("ap3216 driver");
MODULE_ALIAS("i2c_device_driver");
driver_char_device
主要实现字符设备的创建,提供应用层访问的open、read、writ、close接口,这一部分可以参考字符设备驱动实现中关于设备号申请、字符设备创建、类创建等流程。
static const struct file_operations ap3216_ops = {
.owner = THIS_MODULE,
.open = ap3216_open,
.read = ap3216_read,
.release = ap3216_release,
};
//创建i2c设备,关联寄存器
static int i2c_device_create(struct ap3216_data *chip)
{
int result;
int major = DEFAULT_MAJOR;
int minor = DEFAULT_MINOR;
struct i2c_client *client = chip->client;
//1. 从内核申请主设备号和子设备号
if (major) {
chip->dev_id= MKDEV(major, minor);
result = register_chrdev_region(chip->dev_id, 1, DEVICE_NAME);
} else {
result = alloc_chrdev_region(&chip->dev_id, 0, 1, DEVICE_NAME);
major = MAJOR(chip->dev_id);
minor = MINOR(chip->dev_id);
}
if (result < 0){
dev_err(&client->dev, "dev alloc id failed\n");
goto exit;
}
// 2. 创建字符设备,关联访问接口和设备号
cdev_init(&chip->cdev, &ap3216_ops);
chip->cdev.owner = THIS_MODULE;
result = cdev_add(&chip->cdev, chip->dev_id, 1);
if (result != 0){
dev_err(&client->dev, "cdev add failed\n");
goto exit_cdev_add;
}
// 3. 创建设备类,关联名称
chip->class = class_create(THIS_MODULE, DEVICE_NAME);
if (IS_ERR(chip->class)){
dev_err(&client->dev, "class create failed!\r\n");
result = PTR_ERR(chip->class);
goto exit_class_create;
}
// 4. 将设备类和字符设备号关联,添加到内核中,创建最终设备
chip->device = device_create(chip->class, NULL, chip->dev_id, NULL, DEVICE_NAME);
if (IS_ERR(chip->device)){
dev_err(&client->dev, "device create failed!\r\n");
result = PTR_ERR(chip->device);
goto exit_device_create;
}
dev_info(&client->dev, "dev create ok, major:%d, minor:%d\r\n", major, minor);
return 0;
exit_device_create:
class_destroy(chip->class);
exit_class_create:
cdev_del(&chip->cdev);
exit_cdev_add:
unregister_chrdev_region(chip->dev_id, 1);
exit:
return result;
}
对于器件配置,最重要的部分就是实现访问读写i2c器件的接口。上面提到过,i2c模块总线在内部转换成i2c_adpater结构管理,i2c器件则转换为i2c_client进行处理,因此通讯就是使用这两个对象管理,这里先列出i2c通讯的原理图。

// i2c读取数据
static int ap3216_read_block(struct i2c_client *client, u8 reg, void *buf, int len)
{
int ret;
struct i2c_msg msg[2];
msg[0].addr = client->addr; // i2c器件地址
msg[0].flags = 0;
msg[0].buf = ® // 寄存器地址
msg[0].len = 1;
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = buf;
msg[1].len = len;
ret = i2c_transfer(client->adapter, msg, 2);
if (ret < 0)
return ret;
if (ret != 2) {
dev_err(&client->dev, "read error:%d\n", ret);
return -EIO;
}
return 0;
}
//i2c写入数据
static int ap3216_write_block(struct i2c_client *client, u8 reg, u8 *buf, u8 len)
{
u8 b[64];
int ret;
struct i2c_msg msg;
if (len > sizeof(b) - 1) {
return -EINVAL;
}
// 写入数据,第一个字节为器件寄存器地址
b[0] = reg;
memcpy(&b[1], buf, len);
msg.addr = client->addr; // i2c器件地址
msg.flags = 0;
msg.buf = b;
msg.len = len + 1;
ret = i2c_transfer(client->adapter, &msg, 1);
if (ret < 0)
return ret;
if (ret != 1) {
dev_err(&client->dev, "write error:%d\n", ret);
return -EIO;
}
return 0;
}
关于i2c的全部代码详细可以参考如下文件:i2c ap3216驱动文件。
device_app
在应用中,使用open,read,close接口即可管理i2c注册的驱动,实现数据的读写。
#define I2C_DRIVER_NAME "/dev/ap3216"
int main(int argc, char *argv[])
{
int fd;
unsigned short databuf[3];
unsigned short ir, als, ps;
int nSize = 0;
// 打开i2c文件设备
fd = open(I2C_DRIVER_NAME, O_RDWR);
if (fd < 0)
{
printf("can't open file %s\r\n", I2C_DRIVER_NAME);
return -1;
}
while (1)
{
// 读取内部数据
nSize = read(fd, databuf, sizeof(databuf));
if (nSize >= 0)
{
ir = databuf[0]; /* ir传感器数据 */
als = databuf[1]; /* als传感器数据 */
ps = databuf[2]; /* ps传感器数据 */
printf("read size:%d\r\n", nSize);
printf("ir = %d, als = %d, ps = %d\r\n", ir, als, ps);
}
usleep(200000); /*100ms */
}
// 关闭文件
close(fd);
return 0;
}
详细源码可以参考:i2c ap3216应用文件。
summary
i2c支持一主多从,常用的触摸屏,io扩展,rtc芯片,检测sensor,adc芯片基本都支持i2c接口,可以说是最常用的片上通讯接口。i2c驱动的实现并不困难,总结起来如下所示。
- 在设备树下添加i2c设备节点,包含器件地址信息(同一个i2c器件地址需要唯一)。
- 驱动中匹配器件节点中compatible属性,实现驱动加载接口。
- 实现应用层访问的接口,本例中实现字符型设备进行访问(也可以通过iio方式访问)。
- 实现硬件访问接口(i2c_transfer),配置器件,并和应用层访问接口关联。
如此,便实现了i2c驱动,这里讲述下i2c驱动开发时遇到的问题和解决办法。
- 驱动不能够正常加载(probe未执行)
- 确定驱动内compatible内容和设备树是否一致。
- 通过ls /sys/bus/i2c/devices/,查看是否有对应节点(以i2c1上的0x1e节点,其为0-001e),如果没有节点,查看设备树是否正确。
- 查看ls /sys/bus/i2c/devices/0-001e/,查看是否有driver节点,如果有表示驱动已经加载(可能是内核中带有驱动),如果期望使用自己的驱动,需要内核配置关闭。
- 访问i2c接口读写失败
- 确定i2c是否有外部上拉电平。
- i2c地址是否正确,分为7bit/10bit, 不左移的原始地址。
- 确定正确的话,可通过示波器或者逻辑分析仪查看引脚电平,判断信号是否正确。
这里基本是我开发调试i2c时的问题,作为第一个接触的通讯接口,按照上面的思路,实现驱动,将器件添加到系统中并不困难。
不过i2c器件总类繁多,有实现精确计时的RTC芯片,I/O功能的扩展芯片,电压管理的驱动芯片,测量温度的传感器芯片,在实际使用中,就需要根据实际功能,配合rtc子系统,input子系统,温控子系统等共同使用。另外,i2c器件在使用过程中需要根据内部的寄存器表进行相应的开发,这就需要长期不断的积累。有些器件除了需要i2c通讯外,还支持引脚翻转来通知主控soc状态变更,这就需要增加中断的支持。另外一些i2c器件,用于检测温湿度,就要配合thermal子系统实现温控处理。总之,i2c总线是用途十分广泛的接口应用,在实践中就需要具体情况,具体分析总结,实现最终应用。