build_embed_linux_system
regmap框架和使用说明
了解过i2c、spi挂载的器件,可以看到都是通过总线连接,且以寄存器的形式去访问器件中的数据。不过在实践中,这类器件根据所挂总线的不同,往往需要不同的接口来进行访问。
- i2c器件:i2c_transfer相关接口
- spi器件:spi_sync相关接口
- mmio器件:readl/writel接口
可以看到,每一种总线的访问方式都有不同,这就增加开发的难度。那么这些访问能否抽象成统一的接口,以读地址的方式去读写相应的数据?regmap框架正是在这一思路下实现,用于屏蔽访问接口差异,以寄存器的方式统一进行处理。
regmap框架结构如下所示。
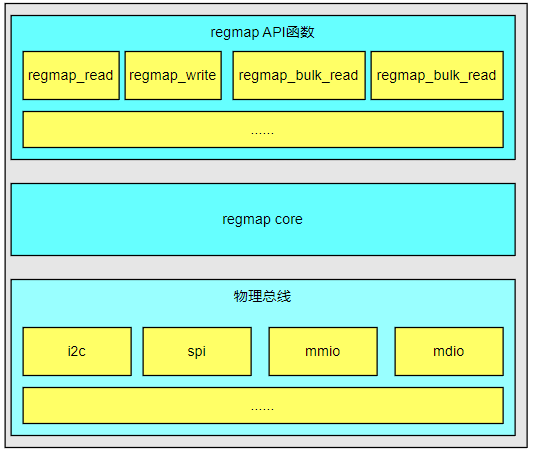
- 底层物理总线:regmap框架对不同的物理总线进行了封装,目前支持的物理总线包括I2C、SPI、MMIO(内存映射I/O)等。这一层负责提供与具体物理总线相关的操作函数。
- regmap核心层:这一层实现了regmap框架的核心功能,包括寄存器的访问、缓存管理等。开发人员不需要关心这一层的具体实现细节。
- regmap API抽象层:这一层向驱动编写人员提供了统一的API接口,用于操作具体的芯片设备。驱动编写人员可以使用这些API接口来读写寄存器、更新寄存器的位等。
regmap抽象封装spi、i2c、mmio(Memory Map I/O)、mdio、spmi(System Power management Interface)等硬件接口,统一使用寄存器的方式进行访问。
对于支持regmap的驱动,其在内核中的结构如下所示。
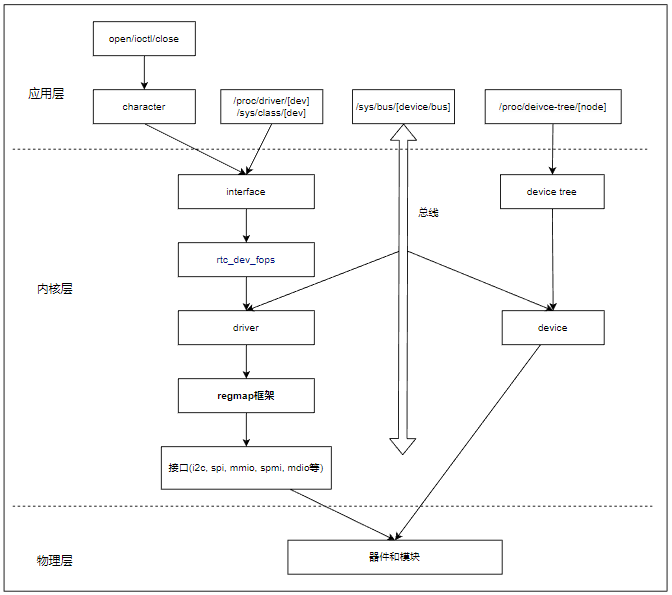
可以看到,regmap只是取代了驱动中i2c、spi接口读写的部分;对于设备树、设备注册、应用访问并没有区别。当你使用regmap框架来开发驱动时,它本身是什么类型的设备,其处理也就没有变化。例如它是i2c接口的传感器,那么你仍然要实现设备树,创建字符设备,实现操作接口,这部分还是一致的。只是操作接口访问i2c、spi寄存器读写时,需要将原先的总线接口替换成regmap_read/regmap_write接口;当然,和总线接口类型,regmap也需要调用相应的init初始化用于适配器件特性。基于前述知识,可以把regmap看作对总线接口i2c、spi更高层次的封装;学习使用regmap框架时,一定要对原有总线接口有一个清晰的认知,这样才能更快速的理解regmap框架。
本节目录如下。
interface
关于regmap的相关接口,主要如下所示。
- regmap interface
- devm_regmap_init_spi 初始化spi对应的regmap接口
- devm_regmap_init_i2c 初始化i2c对应的regmap接口
- devm_regmap_init_mdio 初始化mido对应的regmap接口
- devm_regmap_init_mmio 初始化mmio对应的regmap接口
- devm_regmap_init_spmi_base 初始化spmi对应得regmap接口
- regmap_read 读取单个寄存器的值
- regmap_bulk_read 批量读取指定数据长度的寄存器值(地址连续递增)
- regmap_raw_read 读取原始值,值不经过config的配置处理
- regmap_noinc_read 批量写入寄存器,但不增加地址位置
- regmap_write 写入单个寄存器的值
- regmap_write_async 异步写入单个寄存器
- regmap_bulk_write 批量写入指定数据长度的寄存器值(地址连续递增)
- regmap_update_bits_base 更新单个寄存器的指定位
这里列出使用到的类型接口和功能说明,下面列出进一步的访问接口说明。
// 初始化spi对应的regmap接口,返回regmap格式的接口
// @dev: spi所属的设备节点
// @config: spi接口的配置
// return: 返回regmap结构
#define devm_regmap_init_spi(dev, config) __regmap_lockdep_wrapper(__devm_regmap_init_spi, #config, dev, config)
struct regmap *__devm_regmap_init_spi(struct spi_device *dev,
const struct regmap_config *config,
struct lock_class_key *lock_key,
const char *lock_name);
// 初始化i2c对应的regmap接口,返回regmap格式的接口
// @dev: i2c所属的设备节点
// @config: i2c接口的配置
// return: 返回regmap结构
#define devm_regmap_init_i2c(dev, config) __regmap_lockdep_wrapper(__devm_regmap_init_i2c, #config, dev, config)
struct regmap *__devm_regmap_init_i2c(struct i2c_client *i2c,
const struct regmap_config *config,
struct lock_class_key *lock_key,
const char *lock_name);
// 读取单个寄存器的值
// @map: 管理regmap的格式
// @reg: 寄存器的首地址
// @val: 寄存器读取返回的值
// return: 0表示成功,此时val中存储读取值,其它表示失败
int regmap_read(struct regmap *map, unsigned int reg, unsigned int *val);
// 读取多个寄存器的值
// @map: 管理regmap的格式
// @reg: 寄存器的首地址
// @val: 寄存器读取返回数据的指针首地址
// @val_count: 需要读取的值的数量
// return: 0表示成功,此时val数组中存储读取值,其它表示失败
int regmap_bulk_read(struct regmap *map, unsigned int reg, void *val, size_t val_count);
// 写入单个寄存器的值
// @map: 管理regmap的格式
// @reg: 寄存器的首地址
// @val: 寄存器需要写入的值
// return: 0表示成功,写入到硬件中,其它表示失败
int regmap_write(struct regmap *map, unsigned int reg, unsigned int val);
// 写入多个寄存器的值
// @map: 管理regmap的格式
// @reg: 寄存器的首地址
// @val: 寄存器写入返回数据的指针首地址
// @val_count: 需要写入的值的数量
// return: 0表示成功,写入到硬件中,其它表示失败
int regmap_bulk_write(struct regmap *map, unsigned int reg, const void *val, size_t val_count);
// 带掩码写入多个寄存器的值
// @map: 管理regmap的格式
// @reg: 寄存器的首地址
// @mask: 设置掩码,设置为1的位会被修改
// @val:需要更新的值
// return: 0表示成功,写入到硬件中,其它表示失败
int regmap_update_bits(struct regmap *map, unsigned int reg, unsigned int mask, unsigned int val)
可以看到,对于接口中,最重要的结构就是用于初始化的struct regmap_config和保存信息的struct regmap属性。
这里以regmap_config进行解释,具体格式如下。
// regmap_config
// 用于初始化,管理regmap_config特性的配置项
struct regmap_config {
const char *name; // 可选的regmap名称。当一个设备有多个寄存器区域时很有用
int reg_bits; // *必选,寄存器地址的长度*
int reg_stride; // 寄存器地址步长,用于多字节操作时地址递增的个数
int reg_downshift; // 执行任何操作前,寄存器地址下移的数目
unsigned int reg_base; // 执行任何操作前,寄存器需要增加的基地址
int pad_bits; // 寄存器和值之间的填充位数
int val_bits; // **必选,一个寄存器值的长度**
bool (*writeable_reg)(struct device *dev, unsigned int reg); // 回调函数,确定寄存器是否可写
bool (*readable_reg)(struct device *dev, unsigned int reg); // 回调函数,确定寄存器是否可读
bool (*volatile_reg)(struct device *dev, unsigned int reg); // 回调函数,确定寄存器是否每次都必须实际读取
bool (*precious_reg)(struct device *dev, unsigned int reg); // 回调函数,返回寄存器是否必须在驱动中读取
bool (*writeable_noinc_reg)(struct device *dev, unsigned int reg); // 回调函数,返回寄存器是否写不自增
bool (*readable_noinc_reg)(struct device *dev, unsigned int reg); // 回调函数,返回寄存器是否读不自增
bool disable_locking; // 是否关闭内部保护,关闭后不能够从多线程访问
bool disable_debugfs; // 可选,不要为这个regmap创建debugfs条目
regmap_lock lock; // 可选的用于回调函数的访问锁
regmap_unlock unlock; // 用于访问锁的释放
void *lock_arg; // lock/unlock传递的数据
int (*reg_read)(void *context, unsigned int reg, unsigned int *val); // 可选的回调,如果填充,将用于执行读操作在总线上不能表示为简单读操作的设备,如SPI、I2C等。
int (*reg_write)(void *context, unsigned int reg, unsigned int val); // 可选的回调,如果填充,将用于执行读操作在总线上不能表示为简单写操作的设备,如SPI、I2C等。
int (*reg_update_bits)(void *context, unsigned int reg,
unsigned int mask, unsigned int val); // 可选的回调函数,如果填充则执行所有update_bits(rmw)操作。
/* Bulk read/write */
int (*read)(void *context, const void *reg_buf, size_t reg_size, // 可选的回调,用于自定义的批量读数据操作
void *val_buf, size_t val_size);
int (*write)(void *context, const void *data, size_t count); // 可选的回调,用于自定义的批量写数据操作
size_t max_raw_read; // 单次允许的最大读取长度
size_t max_raw_write; // 单次允许的最大写入长度
bool fast_io; // 是否使用自旋锁代替lock/unlock
bool io_port; // 支持IO端口访问器。只有当MMIO和IO端口访问可以区分时才有意义。
unsigned int max_register; // 可选,指定最大有效的寄存器地址
const struct regmap_access_table *wr_table; // 指定寄存器的可写表格
const struct regmap_access_table *rd_table; // 指定寄存器的可读表格
const struct regmap_access_table *volatile_table; // 指定寄存器的可缓存表格
const struct regmap_access_table *precious_table; // 指定寄存器是否只能驱动访问的表格
const struct regmap_access_table *wr_noinc_table; // 定义寄存器写入是否自增的表格
const struct regmap_access_table *rd_noinc_table; // 定义寄存器读取是否自增的表格
const struct reg_default *reg_defaults; // 寄存器的默认值(上电)
unsigned int num_reg_defaults; // 寄存器默认值的数目
enum regcache_type cache_type; // 实际的缓存类型
const void *reg_defaults_raw; // 寄存器上电的复位值数组(用于支持寄存器缓存)
unsigned int num_reg_defaults_raw; // 复位值数组的长度
unsigned long read_flag_mask; // **在读操作时,在寄存器的顶部字节设置掩码(需要根据器件确定)**
unsigned long write_flag_mask; // **在写操作时,在寄存器的顶部字节设置掩码(需要根据器件确定**
bool zero_flag_mask; // 如果设置,即使read_flag_mask和write_flag_mask都是空的,也会使用它们。
bool use_single_read; // 是否将多次读取转换为单次读取
bool use_single_write; // 是否将多次写入转换为单次写入
bool use_relaxed_mmio; // 定义mmio操作不使用内核屏障
bool can_multi_write; // 是否支持多写的批量写操作
enum regmap_endian reg_format_endian; // 格式化寄存器地址的字节序。
enum regmap_endian val_format_endian; // 格式化寄存器值的字节序
const struct regmap_range_cfg *ranges; // 虚拟地址范围的配置项数组。
unsigned int num_ranges; // 虚拟地址内部的数目
bool use_hwlock; // 说明是否应该使用硬件自旋锁。
bool use_raw_spinlock; // 说明是否应该使用原始自旋锁。
unsigned int hwlock_id; // 指定硬件自旋锁id
unsigned int hwlock_mode; // 硬件自旋锁模式,应该是HWLOCK_IRQSTATE、HWLOCK_IRQ或0。
bool can_sleep; // 定义设备是否允许休眠
};
理解了这些,似乎就可以实现regmap的访问了。然而使用regmap框架进行驱动开发的现实面临两大问题。
- 为什么这么多配置选项,在开发中主要配置有哪些。
- 对于具体的i2c,spi器件或者内部模块,该如何定义初始化配置,实现功能。
这里解释下,前面说到regmap是统一管理内部reg、spi、i2c、mdio等接口,访问相应硬件的框架。而作为这类器件,除了接口,对于硬件上访问的差异是客观存在的,这里列出一部分。
- 器件单次读写长度不一致,例如传感器有1字节的(扩展芯片pcf8563), 4字节的(内部模块寄存器),还有一些64位芯片,内部模块寄存器需要8字节读取。
- 器件单次支持读写的个数不一致,有的器件支持单次多读或单次多写,而有的器件每次只能写单个长度,不支持自动递增。
- 对于器件内部的寄存器也有读写权限的差异,包含只读(r-o),只写(w-o),可读可写(rw),写清除(wc),读清除(rc)等。
- 一些特殊器件,地址位的某些位定义对器件的读/写方式。
这些差异最终要反映到输出的电平信号上,也就需要软件来支持配置项去定义。对于开发者来说,配置项虽然多,不过大部分并不需要关系,常用的需要配置的选项如下所示。
- reg_bits: 必选配置,定义寄存器地址的bits数,1字节为8,2字节为16,依次类推。
- val_bits: 必选配置,定义单次读取寄存器内部值得bits数,1字节为8,2字节为16,依次类推(注意:数据位数和寄存器地址位数没有必然联系,例如地址0x1800, 值0x01也是允许的,不过对于内部模块寄存器,数据位数和地址位数是一致的)。
- reg_base: 访问寄存器时,定义的基地址,实际地址为(reg_base + reg_addr), 以实际地址0x120为例,如果定义基地址为0x100, 这样寄存器使用0x20既可以访问,这对于内部模块寄存器访问可以简化操作,大部分使用默认0即可。。
- reg_stride: 定义寄存器地址的步进字节,有效的寄存器地址是该值的倍数,设置为0,当成1使用。例如寄存器地址0x00,0x04, 0x08…,reg_bits位数就是8bit,stride步进就是4,而对于地址0x1c000000, 0x1c000001…,reg_bits位数就是32,stride的步进是1;地址0x1d000000,0x1d000004…,reg_bits位数就是32,stride的步进是4;可以看到,寄存器位数和步进并没有确定关系,不过寄存器的地址一定是步进的倍数。
- reg_downshift: 访问寄存器时,寄存器默认右移的位数,大部分使用默认0即可。
- read_flag_mask: 应对有些器件的寄存器通过指定bit的位置位表示读,寄存器地址发送时置相应位。
- write_flag_mask: 应对有些器件的寄存器通过指定bit的位置位表示写,寄存器地址发送时置相应位。
- max_register: 用于限制允许访问的最大寄存器地址。
至于其它参数,虽然也同样各有用途,不过只在特定器件或者希望附加功能时配置,使用默认的值也基本能实现功能,可以先不关注,遇到了在总结即可。下面将以实际应用来分析regmap的实现,因为这些器件在i2c,spi,rtc这些章节都有说明,因此这里不在描述如何加载驱动,注册设备文件的实现,专注于封装操作硬件的接口。
regmap_driver
regmap是对器件操作的封装,那么我们在使用时,最重要的就是理解器件说明中的关键信息,主要如下所示。
- 访问寄存器的字节数。
- 寄存器数据的位数。
- 读写是否需要不同的掩码(主要对于spi设备,i2c设备会在使用init接口时自动处理)。
- 是否支持多读,还是单个读取。
这些都是在芯片手册中存在的,以下参考说明。
ap3216_driver
下面器件来自于ap3216c的手册,写入和读取协议如下。

参考文档说明,器件的特性如下。
- 操作为i2c接口。
- 访问寄存器的字节数为8bit。
- 寄存器内数据的位数为8bit。
- 不支持单次多个读取,因此只能使用regmap_read/write接口,使用regmap_bulk_read/write接口,需要置位use_single_read。
则其访问硬件的接口实现如下所示。
// 定义ap3216的配置接口
const struct regmap_config ap3216_regmap_config = {
.reg_bits = 8, // 寄存器地址位数,8bit(1Byte)
.val_bits = 8, // 寄存器数据位数,8bit(1Byte)
//其它默认为0,可省略
//不使用bulk接口,reg_stride可不设置,默认0,当作1
};
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
//......
//2.初始化regmap i2c控制结构
chip->map = devm_regmap_init_i2c(client, &ap3216_regmap_config);
if (IS_ERR(chip->map))
{
dev_err(&client->dev, "chip map init failed\n");
return -ENXIO;
}
//......
}
static int read_values(struct ap3216_data* chip, int *readbuf)
{
u8 i;
int ret;
// 通过regmap循环多次读取
for (i = 0; i < 6; i++) {
ret = regmap_read(chip->map, AP3216C_IRDATALOW + i, &readbuf[i]);
if (ret) {
dev_err(&chip->client->dev, "ap316_read err:%s, %d", __func__, ret);
return -EIO;
}
}
if (readbuf[0]&(1<<7)){
chip->data.ir = 0;
} else{
chip->data.ir = ((unsigned short)readbuf[1] << 2) | (readbuf[0] & 0X03);
}
chip->data.als = ((unsigned short)readbuf[3] << 8) | readbuf[2];
if (readbuf[4]&(1<<6)) {
chip->data.ps = 0;
} else {
chip->data.ps = ((unsigned short)(readbuf[5] & 0X3F) << 4) | (readbuf[4] & 0X0F);
}
return 0;
}
使用的接口如下。
- devm_regmap_init_i2c用于初始化。
- regmap_read用于读取器件内部寄存器。
- regmap_write用于写入器件内部寄存器。
详细的regmap ap3216c驱动实现可见:regmap ap3216c驱动实现。
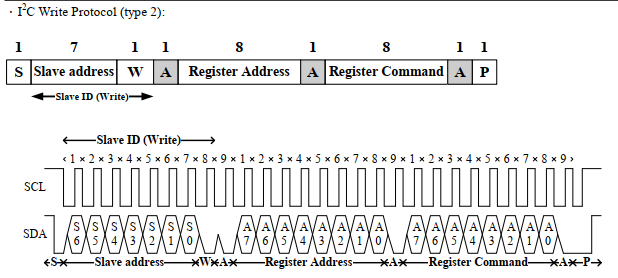
pcf8563_driver
下面器件来自于pcf8563的手册,写入和读取协议如下。
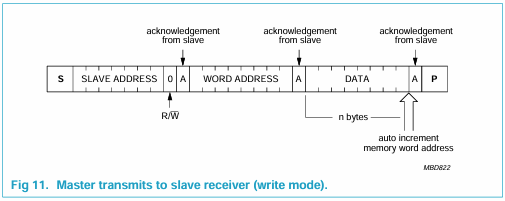
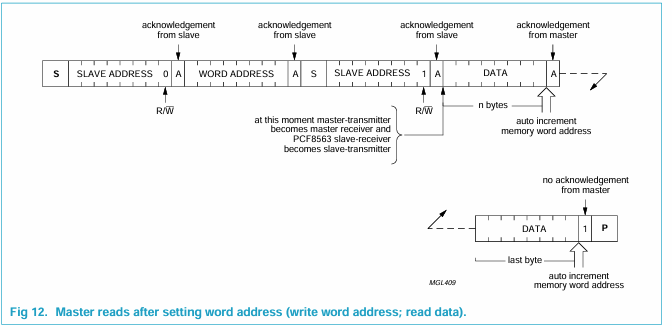
参考文档说明,器件的特性如下。
- 操作为i2c接口。
- 访问寄存器的字节数为8bit。
- 寄存器内数据的位数为8bit。
- 支持单次多个读取,可以使用regmap_bulk_read/write接口,当然也支持regmap_read/write。
则其访问硬件的接口实现如下所示。
// 定义pcf8563的配置接口
const struct regmap_config rtc_regmap_config = {
.reg_bits = 8, // 寄存器地址位数,8bit(1Byte)
.val_bits = 8, // 寄存器数据位数,8bit(1Byte)
.reg_stride = 1, // 寄存器地址步长,1Byte,用于支持bulk_read/write
.max_register = 255, // 允许读取的最大寄存器地址
//其它默认为0,可省略
};
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
//......
// 2.初始化regmap i2c控制结构
chip->map = devm_regmap_init_i2c(client, &rtc_regmap_config);
if (IS_ERR(chip->map))
{
dev_err(&client->dev, "chip map init failed\n");
return -ENXIO;
}
//......
}
static int pcf8563_get_time(struct device *dev, struct rtc_time *tm)
{
struct i2c_client *client = to_i2c_client(dev);
struct pcf8563_data *chip = i2c_get_clientdata(client);
unsigned char buf[9];
int err;
// 单次多字节读取寄存器值
err = regmap_bulk_read(chip->map, PCF8563_REG_CONTROL1, buf, 9);
if (err) {
dev_err(&client->dev,
"dev read block issue!.\n");
return err;
}
if (buf[PCF8563_REG_SECONDS] & (1<<7)) {
dev_err(&client->dev,
"low voltage detected, date/time is not reliable.\n");
return -EINVAL;
}
tm->tm_sec = bcdToDec(buf[PCF8563_REG_SECONDS] & 0x7F);
tm->tm_min = bcdToDec(buf[PCF8563_REG_MINUTES] & 0x7F);
tm->tm_hour = bcdToDec(buf[PCF8563_REG_HOURS] & 0x3F); /* rtc hr 0-23 */
tm->tm_mday = bcdToDec(buf[PCF8563_REG_DAYS] & 0x3F);
tm->tm_wday = buf[PCF8563_REG_WEEKDAYS] & 0x07;
tm->tm_mon = bcdToDec(buf[PCF8563_REG_MONTHS] & 0x1F) - 1; /* rtc mn 1-12 */
tm->tm_year = bcdToDec(buf[PCF8563_REG_YEARS]) + 100;
chip->c_polarity = (buf[PCF8563_REG_MONTHS] & (1<<7)) ?
(tm->tm_year >= 100) : (tm->tm_year < 100);
dev_info(&client->dev, "%s: tm is secs=%d, mins=%d, hours=%d, "
"mday=%d, mon=%d, year=%d, wday=%d\n",
__func__,
tm->tm_sec, tm->tm_min, tm->tm_hour,
tm->tm_mday, tm->tm_mon, tm->tm_year, tm->tm_wday);
return 0;
}
static int pcf8563_set_time(struct device *dev, struct rtc_time *tm)
{
struct i2c_client *client = to_i2c_client(dev);
struct pcf8563_data *chip = i2c_get_clientdata(client);
unsigned char buf[9];
int err;
dev_info(&client->dev, "%s: secs=%d, mins=%d, hours=%d, "
"mday=%d, mon=%d, year=%d, wday=%d\n",
__func__,
tm->tm_sec, tm->tm_min, tm->tm_hour,
tm->tm_mday, tm->tm_mon, tm->tm_year, tm->tm_wday);
/* hours, minutes and seconds */
buf[PCF8563_REG_SECONDS] = decToBcd(tm->tm_sec);
buf[PCF8563_REG_MINUTES] = decToBcd(tm->tm_min);
buf[PCF8563_REG_HOURS] = decToBcd(tm->tm_hour);
buf[PCF8563_REG_DAYS] = decToBcd(tm->tm_mday);
buf[PCF8563_REG_WEEKDAYS] = tm->tm_wday & 0x07;
/* month, 1 - 12 */
buf[PCF8563_REG_MONTHS] = decToBcd(tm->tm_mon + 1);
/* year and century */
buf[PCF8563_REG_YEARS] = decToBcd(tm->tm_year - 100);
if (chip->c_polarity ? (tm->tm_year >= 100) : (tm->tm_year < 100)) {
buf[PCF8563_REG_MONTHS] |= (1<<7);
}
// 单次多字节写入寄存器值
err = regmap_bulk_write(chip->map, PCF8563_REG_SECONDS,
buf + PCF8563_REG_SECONDS, 9 - PCF8563_REG_SECONDS);
if (err) {
dev_err(&client->dev, "dev read block issue!.\n");
return err;
}
return 0;
}
使用的接口如下。
- devm_regmap_init_i2c用于初始化。
- regmap_bulk_read用于多字节读取器件内部寄存器。
- regmap_bulk_write用于多字节写入器件内部寄存器。
详细的regmap pcf8563驱动实现可见:regmap pcf8563驱动代码。
icm20608_driver
下面器件来自于icm20608的手册,操作协议如下。
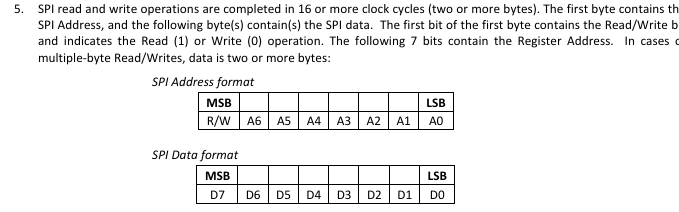
参考文档说明,器件的特性如下。
- 操作为spi接口。
- 访问寄存器的字节数为8bit。
- 寄存器内数据的位数为8bit。
- 支持单次多个读取,可以使用regmap_bulk_read/write接口,当然也支持regmap_read/write。
- 寄存器地址的MSB位标识R/W,其中1表示读取。
则其访问硬件的接口实现如下所示。
const struct regmap_config icm20608_regmap_config = {
.reg_bits = 8, // 寄存器地址位数,8bit(1Byte)
.val_bits = 8, // 寄存器地址位数,8bit(1Byte)
.reg_stride = 1, // 寄存器地址步长,1Byte,用于支持bulk_read/write
.read_flag_mask = BIT(7), // 寄存器地址MSB位标识R/W,其中1表示读取,0表示写入
.max_register = 255, // 允许读取的最大寄存器地址
//其它默认为0,可省略
};
static int spi_hardware_init(struct spi_icm_data *chip)
{
int data = 0;
struct spi_device *spi;
// 1.配置spi位regmap操作模式
spi = (struct spi_device *)chip->private_data;
chip->map = devm_regmap_init_spi(spi, &icm20608_regmap_config);
if (IS_ERR(chip->map))
{
dev_err(&spi->dev, "chip map init failed\n");
}
// 2.复位芯片
regmap_write(chip->map, ICM20_PWR_MGMT_1, 0x80);
mdelay(50);
regmap_write(chip->map, ICM20_PWR_MGMT_1, 0x01);
mdelay(50);
// 3.读取芯片ID
regmap_read(chip->map, ICM20_WHO_AM_I, &data);
dev_info(&spi->dev, "ICM20608 ID = %#X\n", data);
// 4.解析设备树,写入寄存器配置信息
icm20608_parse_dt(chip);
regmap_write(chip->map, ICM20_SMPLRT_DIV, chip->reg_config.smplrt_div);
regmap_write(chip->map, ICM20_GYRO_CONFIG, chip->reg_config.gyro_config);
regmap_write(chip->map, ICM20_ACCEL_CONFIG, chip->reg_config.accel_config);
regmap_write(chip->map, ICM20_CONFIG, chip->reg_config.config);
regmap_write(chip->map, ICM20_ACCEL_CONFIG2, chip->reg_config.accel_config2);
regmap_write(chip->map, ICM20_PWR_MGMT_2, chip->reg_config.pwr_mgmt_2);
regmap_write(chip->map, ICM20_LP_MODE_CFG, chip->reg_config.lp_mode_cfg);
regmap_write(chip->map, ICM20_FIFO_EN, chip->reg_config.fifo_en);
return 0;
}
static ssize_t icm20608_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
int ret;
unsigned char readbuf[14];
struct spi_icm_data *chip = (struct spi_icm_data *)filp->private_data;
struct spi_device *spi = (struct spi_device *)chip->private_data;
// 读取寄存器的值
ret = regmap_bulk_read(chip->map, ICM20_ACCEL_XOUT_H, readbuf, 14);
if (ret < 0)
{
dev_err(&spi->dev, "icm20608 read failed:%d\n", ret);
return 0;
}
// 读取数据转换内部格式,并提交到应用buffer内
chip->data.accel_x_adc = (signed short)((readbuf[0] << 8) | readbuf[1]);
chip->data.accel_y_adc = (signed short)((readbuf[2] << 8) | readbuf[3]);
chip->data.accel_z_adc = (signed short)((readbuf[4] << 8) | readbuf[5]);
chip->data.temp_adc = (signed short)((readbuf[6] << 8) | readbuf[7]);
chip->data.gyro_x_adc = (signed short)((readbuf[8] << 8) | readbuf[9]);
chip->data.gyro_y_adc = (signed short)((readbuf[10] << 8) | readbuf[11]);
chip->data.gyro_z_adc = (signed short)((readbuf[12] << 8) | readbuf[13]);
ret = copy_to_user(buf, &chip->data, sizeof(chip->data));
if (ret < 0) {
dev_err(&spi->dev, "copy_to_user failed:%d\n", ret);
return -EFAULT;
}
return cnt;
}
详细的regmap icm20608驱动实现可见:regmap icm20608驱动代码。
summary
可以看到,regmap是对现有的i2c、spi、mmio等总线寄存器访问接口的封装。通过统一处理,可以说大幅度简化了驱动实现的难度。不过从regmap的操作流程来看,都是先写寄存器地址,再写操作数据,这样就只能用于带寄存器的外部器件。对于部分i2c器件或SPI器件,不存在寄存器,只支持直接操作数据,这时候就不符合regmap的操作方式,只能使用基础的i2c和spi框架进行管理。
为了应对开发中的复杂情况,开发人员仍然需要理解基础接口的实现方式,才能更方便的使用regmap实现具体功能。