build_embed_linux_system
rtc管理子系统
RTC(Real-Time Clock)模块,即实时时钟模块,是一种用于测量时间的电子设备;主要功能包含时间记录(年月日时分秒,星期)、闹钟定时功能;可以实现基于星期,以及时分秒的定时功能。
RTC模块拥有独立于SOC的供电功能,一般为纽扣电池,从而实现准确的时间记录(掉电执行);设备唤醒,配合芯片的唤醒引脚或者内部模块实现。RTC从硬件区分来说,分为芯片内置的RTC以及外部的RTC器件,不过它们的区别只在于硬件访问的操作。对于内核加载的方式,以及应用访问的功能实现,则基本一致。
RTC最终会以字符设备形式向用户空间提供/dev/rtcX,但驱动开发者通常无需自行实现字符设备,只需要实现rtc_class_ops并注册RTC设备即可。
对于RTC设备驱动,目录如下所示。
本章节快速学习知识点:
- 回顾i2c器件驱动的实现方法。
- 系统中注册rtc设备的方法,以及和上层交互的接口。
- 应用层访问rtc设备的接口。
rtc_frame
这里提供外接在i2c接口的rtc器件在系统中注册和访问的实现。
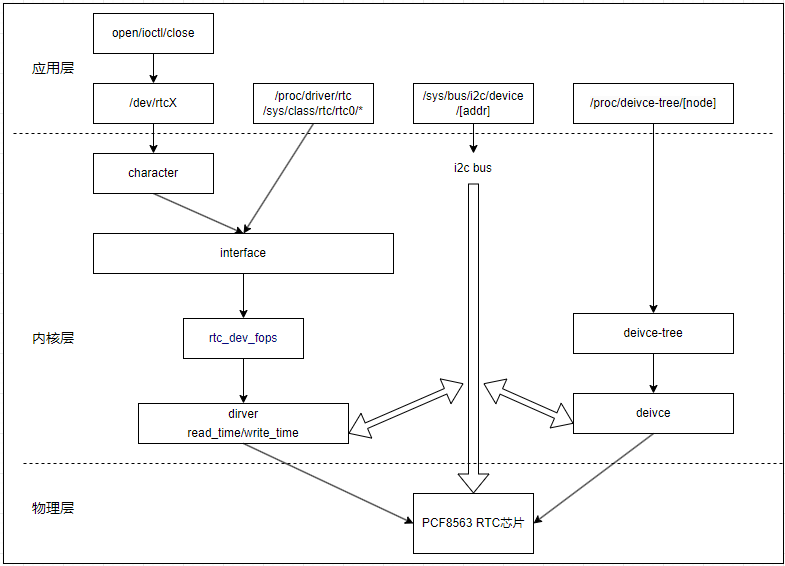
其中大部分功能由内核实现,对于用户来说,主要包含两部分实现。
- 实现设备树,生成rtc设备。
- 实现驱动,在系统中创建rtc设备文件,添加访问的接口。
另外RTC支持二进制和BCD两种存储模式,这两种模式的转换如下所示。
// 21 => 0x21
// BIN => BCD
out_bcd = ((in_bin / 10) << 4 | (in_bin % 10))
// BCD => BIN
// 0x21 => 21
out_bin = ((in_bcd >> 4) * 10) + (in_bcd & 0x0F)
可以看到,BCD不是十六进制数值,而是用4位二进制分别存储十进制的每一位数字,通过高4位和低4位的分别处理,既可以实现BCD和二进制数据之间的转换。
rtc_driver
本节中使用i2c接口访问的rtc器件PCF8563;其实现参考i2c总线如何加载器件驱动,以及rtc子系统的应用。
其中i2c总线部分参考:i2c驱动和接口说明;对于rtc子系统的应用,说明如下所示。
rtc_interface
关于rtc的相关接口并不复杂,主要有申请rtc管理结构资源,向系统中注册rtc设备和管理类等。
关于注册rtc设备的接口,具体如下所示。
// 申请管理RTC设备的资源
// @dev: rtc器件所在的设备节点
// return: 成功返回rtc_device结构,失败返回NULL
struct rtc_device *devm_rtc_allocate_device(struct device *dev)
// 向系统中注册rtc设备
// @owner: 模块拥有者,一般为驱动模块
// @rtc: rtc设备结构
// return: 成功返回0,失败返回负数
#define devm_rtc_register_device(device) \
__devm_rtc_register_device(THIS_MODULE, device)
int __devm_rtc_register_device(struct module *owner, struct rtc_device *rtc)
// 向系统中注册rtc设备, 返回rtc_device
// 执行两步骤
// 1. devm_rtc_allocate_device
// 2. devm_rtc_register_device
rtc_device *devm_rtc_device_register(struct device *dev,
const char *name,
const struct rtc_class_ops *ops,
struct module *owner)
注意:在Linux系统中,优先使用devm_rtc_allocate_device+devm_rtc_register_device组合的方式进行RTC设备的注册。
对于RTC模块最关键的就是其中的”struct rtc_device”结构,保存所有rtc信息,具体如下所示。
// rtc设备操作接口
struct rtc_class_ops {
int (*ioctl)(struct device *, unsigned int, unsigned long); //ioctl控制函数,用于控制命令
int (*read_time)(struct device *, struct rtc_time *); //读取时间(驱动实现)
int (*set_time)(struct device *, struct rtc_time *); //设置时间(驱动实现)
int (*read_alarm)(struct device *, struct rtc_wkalrm *); //读取闹钟时间(驱动实现)
int (*set_alarm)(struct device *, struct rtc_wkalrm *); //设置闹钟时间(驱动实现)
int (*proc)(struct device *, struct seq_file *); //procfs操作接口
int (*alarm_irq_enable)(struct device *, unsigned int enabled); //闹钟中断功能使能(驱动实现)
int (*read_offset)(struct device *, long *offset); //读取偏移时间
int (*set_offset)(struct device *, long offset); //设置偏移时间
int (*param_get)(struct device *, struct rtc_param *param); //获取rtc参数
int (*param_set)(struct device *, struct rtc_param *param); //设置rtc参数
};
// rtc设备结构
struct rtc_device {
struct device dev; // 注册时创建的rtc设备
struct module *owner; // rtc设备的拥有者,一般为注册的驱动
int id; // rtc设备编号
const struct rtc_class_ops *ops; //定义rtc支持的操作函数,用于应用层访问
//......
unsigned long features[BITS_TO_LONGS(RTC_FEATURE_CNT)]; // rtc定时器定义支持的功能
/*
#define RTC_FEATURE_ALARM 0 // 支持闹钟功能
#define RTC_FEATURE_ALARM_RES_MINUTE 1 // 支持闹钟,分辨率为分钟
#define RTC_FEATURE_NEED_WEEK_DAY 2 // 支持星期记录
#define RTC_FEATURE_ALARM_RES_2S 3 // 支持闹钟,分辨率为2s
#define RTC_FEATURE_UPDATE_INTERRUPT 4 // RTC更新产生中断
#define RTC_FEATURE_CORRECTION 5 // 支持时间校正功能
#define RTC_FEATURE_BACKUP_SWITCH_MODE 6 // 支持备份模式
#define RTC_FEATURE_ALARM_WAKEUP_ONLY 7 // 闹钟仅用于唤醒
*/
time64_t range_min; // 最小秒数,用于描述rtc支持的最小时间
time64_t range_max; // 最大秒数,用于描述rtc支持的最大时间
};
rtc_chip_tree
rtc器件PCF8563连接在i2c2,有一个中断引脚gpio1_2,用于上报alarm信息。
关于rtc器件的设备树,具体如下所示。
&i2c2 {
//...
pinctrl-0 = <&pinctrl_i2c2>; // 复用的引脚关系
status = "okay"; // i2c2模块使能
pcf8563: pcf8563@51 {
compatible = "rmk,pcf8563"; // 标签,用于驱动中匹配
reg = <0x51>; // i2c访问设备的器件地址
pinctrl-names = "default"; // rtc复用引脚的别名
pinctrl-0 = <&pinctrl_rtc>; // rtc复用引脚功能定义
interrupt-parent = <&gpio1>; // rtc alarm引脚对应的中断控制器
interrupts = <2 IRQ_TYPE_EDGE_FALLING>; // rtc alarm引脚对应的中断线号,触发方式(闹钟触发后拉低信号)
interrupt-gpios = <&gpio1 2 GPIO_ACTIVE_LOW>; // 中断引脚对应的gpio
status = "okay"; // rtc模块使能
};
};
可以看到,PCF8563虽然是RTC设备,但是硬件仍然是挂载在I2C总线上处理,这部分可以参考I2C总线驱动的实现,这里不再赘述。
rtc_driver_code
上面实现了定义的设备节点,下一步就算实现器件的操作的代码,并关联的系统内核中。
- 器件驱动加载的接口
作为i2c外部设备,这部分的内容和如何加载I2C驱动一致,这里不在赘述。
- 器件注册到系统内核的实现
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret;
int irq;
struct pcf8563_data *chip = NULL;
unsigned char buf;
// 1.申请管理RTC PCF8563的数据块
chip = devm_kzalloc(&client->dev, sizeof(struct pcf8563_data), GFP_KERNEL);
if (!chip){
dev_err(&client->dev, "chip malloc error!\n");
return -ENOMEM;
}
chip->client = client;
i2c_set_clientdata(client, chip);
// 2. 申请rtc资源,并注册到内核
chip->rtc = devm_rtc_allocate_device(&client->dev);
if (IS_ERR(chip->rtc)){
dev_err(&client->dev, "rtc alloc device failed!\n");
return PTR_ERR(chip->rtc);
}
chip->rtc->owner = THIS_MODULE;
chip->rtc->ops = &pcf8563_ops;
set_bit(RTC_FEATURE_ALARM_RES_MINUTE, chip->rtc->features);
clear_bit(RTC_FEATURE_UPDATE_INTERRUPT, chip->rtc->features);
chip->rtc->range_min = RTC_TIMESTAMP_BEGIN_2000;
chip->rtc->range_max = RTC_TIMESTAMP_END_2099;
chip->rtc->set_start_time = true;
ret = devm_rtc_register_device(chip->rtc);
if (ret) {
dev_err(&client->dev, "rtc register failed!\n");
return ret;
}
// ......
}
- 初始化关联rtc硬件处理
static int i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
//......
buf = 0;
dev_err(&client->dev, "start write!\n");
ret = pcf8563_write_block(client, PCF8563_REG_CONTROL2, &buf, 1);
if (ret < 0) {
dev_err(&client->dev, "%s: write error\n", __func__);
return ret;
}
// 4. 配置中断相关引脚
chip->irq_desc = devm_gpiod_get(&client->dev, "interrupt", GPIOD_IN);
if (IS_ERR(chip->irq_desc)) {
dev_info(&client->dev, "devm_gpiod_get error!\n");
return PTR_ERR(chip->irq_desc);
}
irq = gpiod_to_irq(chip->irq_desc);
if (irq < 0) {
return irq;
}
ret = devm_request_threaded_irq(&client->dev,
irq,
NULL,
pcf8563_irq_handler,
IRQF_ONESHOT | IRQF_TRIGGER_FALLING,
"rtc_irq",
(void *)chip);
if (ret < 0) {
dev_err(&client->dev, "rtc interrupt config:%d\n", ret);
return -EINVAL;
}
//......
}
- 内核访问具体硬件的接口
RTC模块提供了访问应用层的接口,不过具体操作还涉及对于硬件的读写操作,这部分需要结合PCF8563的产品手册进行处理。
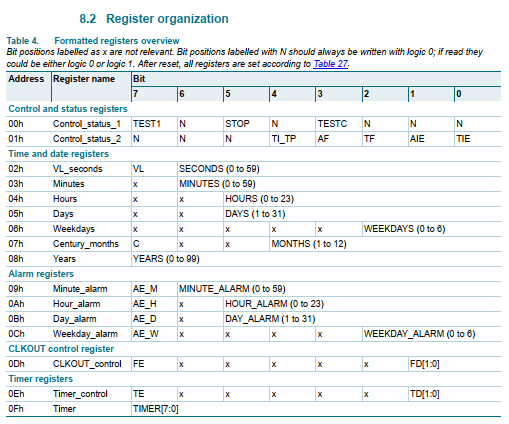
关于寄存器的说明来自于”8.Functional desciption”的说明。
// 获取当前时间
static int pcf8563_get_time(struct device *dev, struct rtc_time *tm)
{
struct i2c_client *client = to_i2c_client(dev);
struct pcf8563_data *chip = i2c_get_clientdata(client);
unsigned char buf[9];
int ret;
ret = pcf8563_read_block(client, PCF8563_REG_CONTROL1, buf, 9);
if (ret) {
dev_err(&client->dev, "dev read block issue!\n");
return ret;
}
if (buf[PCF8563_REG_SECONDS] & (1<<7)) {
dev_err(&client->dev, "low voltage detected, date/time is not reliable.\n");
return -EINVAL;
}
tm->tm_sec = bcdToDec(buf[PCF8563_REG_SECONDS] & 0x7F);
tm->tm_min = bcdToDec(buf[PCF8563_REG_MINUTES] & 0x7F);
tm->tm_hour = bcdToDec(buf[PCF8563_REG_HOURS] & 0x3F); /* rtc hr 0-23 */
tm->tm_mday = bcdToDec(buf[PCF8563_REG_DAYS] & 0x3F);
tm->tm_wday = buf[PCF8563_REG_WEEKDAYS] & 0x07;
tm->tm_mon = bcdToDec(buf[PCF8563_REG_MONTHS] & 0x1F) - 1; /* rtc mn 1-12 */
tm->tm_year = bcdToDec(buf[PCF8563_REG_YEARS]);
chip->c_polarity = (buf[PCF8563_REG_MONTHS] & (1<<7)) ? 1 : 0;
// 依据当前驱动约定解释
if (chip->c_polarity) {
tm->tm_year += 100;
}
dev_info(&client->dev, "%s: tm is secs=%d, mins=%d, hours=%d, "
"mday=%d, mon=%d, year=%d, wday=%d\n",
__func__,
tm->tm_sec, tm->tm_min, tm->tm_hour,
tm->tm_mday, tm->tm_mon, tm->tm_year, tm->tm_wday);
return 0;
}
// 设置当前时间
static int pcf8563_set_time(struct device *dev, struct rtc_time *tm)
{
struct i2c_client *client = to_i2c_client(dev);
struct pcf8563_data *chip = i2c_get_clientdata(client);
unsigned char buf[9];
int ret;
dev_info(&client->dev, "%s: secs=%d, mins=%d, hours=%d, "
"mday=%d, mon=%d, year=%d, wday=%d\n",
__func__,
tm->tm_sec, tm->tm_min, tm->tm_hour,
tm->tm_mday, tm->tm_mon, tm->tm_year, tm->tm_wday);
/* hours, minutes and seconds */
buf[PCF8563_REG_SECONDS] = decToBcd(tm->tm_sec);
buf[PCF8563_REG_MINUTES] = decToBcd(tm->tm_min);
buf[PCF8563_REG_HOURS] = decToBcd(tm->tm_hour);
buf[PCF8563_REG_DAYS] = decToBcd(tm->tm_mday);
buf[PCF8563_REG_WEEKDAYS] = tm->tm_wday & 0x07;
/* month, 1 - 12 */
buf[PCF8563_REG_MONTHS] = decToBcd(tm->tm_mon + 1);
/* year and century */
if(tm->tm_year >= 100) {
buf[PCF8563_REG_YEARS] = decToBcd(tm->tm_year - 100);
buf[PCF8563_REG_MONTHS] |= (1<<7);
chip->c_polarity = 1;
} else {
buf[PCF8563_REG_YEARS] = decToBcd(tm->tm_year);
chip->c_polarity = 0;
}
ret = pcf8563_write_block(client, PCF8563_REG_SECONDS, buf + PCF8563_REG_SECONDS, 9 - PCF8563_REG_SECONDS);
if (ret) {
dev_err(&client->dev, "dev read block issue!.\n");
return ret;
}
return 0;
}
// 读取闹钟时间
static int pcf8563_read_alarm(struct device *dev, struct rtc_wkalrm *tm)
{
struct i2c_client *client = to_i2c_client(dev);
unsigned char buf[4];
int ret;
ret = pcf8563_read_block(client, PCF8563_REG_ALARM_MINUTE, buf, 4);
if (ret) {
dev_err(&client->dev, "pcf8563_read_block failed:%d!\n", ret);
return ret;
}
dev_dbg(&client->dev,
"%s: raw data is min=%02x, hr=%02x, mday=%02x, wday=%02x\n",
__func__, buf[0], buf[1], buf[2], buf[3]);
tm->time.tm_sec = 0;
tm->time.tm_min = bcdToDec(buf[0] & 0x7F);
tm->time.tm_hour = bcdToDec(buf[1] & 0x3F);
tm->time.tm_mday = bcdToDec(buf[2] & 0x3F);
tm->time.tm_wday = bcdToDec(buf[3] & 0x7);
ret = pcf8563_get_alarm_mode(client, &tm->enabled, &tm->pending);
if (ret) {
dev_err(&client->dev, "pcf8563_get_alarm_mode err:%d!\n", ret);
return ret;
}
dev_dbg(&client->dev, "%s: tm is mins=%d, hours=%d, mday=%d, wday=%d,"
" enabled=%d, pending=%d\n", __func__, tm->time.tm_min,
tm->time.tm_hour, tm->time.tm_mday, tm->time.tm_wday,
tm->enabled, tm->pending);
return 0;
}
// 设置闹钟底层回调
static int pcf8563_set_alarm(struct device *dev, struct rtc_wkalrm *tm)
{
struct i2c_client *client = to_i2c_client(dev);
unsigned char buf[4];
int ret;
buf[0] = decToBcd(tm->time.tm_min);
buf[1] = decToBcd(tm->time.tm_hour);
buf[2] = decToBcd(tm->time.tm_mday);
buf[3] = tm->time.tm_wday & 0x07;
ret = pcf8563_write_block(client, PCF8563_REG_ALARM_MINUTE, buf, 4);
if (ret) {
dev_err(&client->dev, "pcf8563_write_block write error\n");
return ret;
}
dev_info(dev, "set alarm, wday:%d, day:%d, timer:%d:%d",
tm->time.tm_wday, tm->time.tm_mday,
tm->time.tm_hour, tm->time.tm_min);
return pcf8563_set_alarm_mode(client, !!tm->enabled);
}
// 设置闹钟中断开启状态
static int pcf8563_alarm_irq_enable(struct device *dev, unsigned int enabled)
{
return pcf8563_set_alarm_mode(to_i2c_client(dev), !!enabled);
}
// 定义内核通过ioctl访问的接口
static const struct rtc_class_ops pcf8563_ops = {
.ioctl = pcf8563_rtc_ioctl,
.read_time = pcf8563_get_time, //读取当前时间
.set_time = pcf8563_set_time, //设置当前时间
.read_alarm = pcf8563_read_alarm, //读取当前闹钟设置时间
.set_alarm = pcf8563_set_alarm, //设置当前闹钟时间
.alarm_irq_enable = pcf8563_alarm_irq_enable, //定义是否开启irq闹钟定时中断
};
- rtc中断alarm处理实现
static irqreturn_t pcf8563_irq_handler(int irq, void *data)
{
struct pcf8563_data *chip = (struct pcf8563_data *)data;
struct i2c_client *client = chip->client;
int ret;
char pending;
ret = pcf8563_get_alarm_mode(client, NULL, &pending);
if (ret) {
dev_err(&client->dev, "pcf8563_get_alarm_mode:%d!\n", ret);
return ret;
}
rtc_update_irq(chip->rtc, 1, RTC_IRQF | RTC_AF);
pcf8563_set_alarm_mode(client, 1);
return IRQ_RETVAL(IRQ_HANDLED);
}
至此关于rtc驱动的实现大致讲解完毕。
详细代码可以参考: pcf8563 rtc驱动程序。
对于内部rtc,其实现也大致相同,不过将i2c访问器件的部分替换为访问内部寄存器的实现,中断也不是外部的引脚中,而是内部的rtc中断,其它基本一致。
rtc_app
当rtc注册成功后,会在系统中创建/dev/rtcX,其中X根据注册驱动的顺序确认。我们可以通过hwclock配合date命令操作此设备文件,实现对于时间的读取和写入,同步到系统时间中。
# 从rtc读取数据
hwclock -r -f /dev/rtc1 # 从rtc中读取时间并显示
# 从rtc读取时间并设置到系统中
hwclock -s -f /dev/rtc1 # 从rtc中读取时间到系统date中
date # 查看当前的系统时间
# 将系统时间设置到rtc1中
date -s '2024-03-29 22:40:00' # 设置系统date时间
hwclock -w -f /dev/rtc1 # 将date时间同步到系统rtc中
当然,也可以通过C语言接口访问此设备文件,这里需要先理解如下结构。
struct rtc_time {
int tm_sec; // 秒 – 取值区间为[0,59]
int tm_min; // 分 - 取值区间为[0,59]
int tm_hour; // 时 - 取值区间为[0,23]
int tm_mday; // 一个月中的日期 - 取值区间为[1,31]
int tm_mon; // 月份(从一月开始,0代表一月) - 取值区间为[0,11]
int tm_year; // 年份,其值等于实际年份减去1900
int tm_wday; // 一周中的第几天 - 取值区间为[0,6],0代表星期天
int tm_yday; // 一年中的第几天 - 取值区间为[0,365],0代表1月1日
int tm_isdst; //夏令时标识符,实行夏令时的时候,tm_isdst为正。不实行夏令时的时候,tm_isdst为0;不了解情况时,tm_isdst为负
};
struct rtc_wkalrm {
unsigned char enabled; /* 0 = alarm disabled, 1 = alarm enabled */
unsigned char pending; /* 0 = alarm not pending, 1 = alarm pending */
struct rtc_time time; /* time the alarm is set to */
};
// ioctl处理rtc的命令
RTC_RD_TIME //读取当前时间
RTC_SET_TIME //设置当前时间
RTC_WKALM_SET //设置alarm闹钟
RTC_WKALM_RD //读取alarm闹钟设置
应用层访问rtc设备文件的应用如下。
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/rtc.h>
#include <poll.h>
#include <sys/stat.h>
#include <signal.h>
struct rtc_time rtc_time = {0};
struct rtc_wkalrm alarm_time = {0};
static unsigned int flag = 0;
#define RTC_DEVICE "/dev/rtc1"
static void alarm_signal_func(int signum)
{
flag = 1;
printf("alarm signal!\r\n");
}
int main(int argc, char *argv[])
{
int device_fd;
int retval, flags;
device_fd = open(RTC_DEVICE, O_RDWR | O_NONBLOCK); //打开rtc设备文件
if (device_fd < 0) {
printf("open %s error!\r\n", RTC_DEVICE);
return -1;
}
retval = ioctl(device_fd, RTC_RD_TIME, &rtc_time); //读取当前时间
if (retval >= 0) {
printf("timer:%d:%d:%d\n", rtc_time.tm_hour, rtc_time.tm_min, rtc_time.tm_sec);
}
printf("retval:%d\n", retval);
// 绑定I/O event,对应底层的中断触发
fcntl(device_fd, F_SETOWN, getpid());
flags = fcntl(device_fd, F_GETFD);
fcntl(device_fd, F_SETFL, flags | FASYNC);
signal(SIGIO, alarm_signal_func);
rtc_time.tm_min += 1;
if (rtc_time.tm_min == 60) {
rtc_time.tm_min = 0;
rtc_time.tm_hour += 1;
}
alarm_time.enabled = 1;
alarm_time.time = rtc_time;
retval = ioctl(device_fd, RTC_WKALM_SET, &alarm_time); //设置alarm时间,到时间后触发alarm中断
if (retval >= 0) {
printf("set alarm success!\n");
}
printf("retval:%d\n", retval);
while (!flag) {
sleep(1);
}
close(device_fd);
return 0;
}
summary
本文以I2C接口RTC器件PCF8563为例,介绍了Linux RTC子系统的基本框架和驱动实现方法。
首先分析了RTC模块的主要功能,包括时间记录、闹钟定时以及掉电保持等特性,并说明了RTC器件常见的BCD时间存储方式及其与二进制数据之间的转换关系。随后结合RTC子系统框架,介绍了RTC设备的注册流程,并以PCF8563为例,详细介绍了RTC驱动的实现流程。并提供了应用层访问的方法。
完整的RTC模块功能,主要包含以下方面。
- RTC硬件,具体的外设模块,可以是内部器件或者I2C外设。
- RTC驱动,用于驱动RTC硬件,实现RTC的注册、初始化、读写、设置、闹钟定时等功能的实现
- RTC子系统,内核提供的,管理RTC模块的接口和管理逻辑。
- 用户应用,用户访问RTC设备文件的方法。
上述各部分共同组成了RTC的模块功能,在实际开发调试中,系统时间出现问题,也要从这四个方面去分析解决,才能事半功倍。